/*
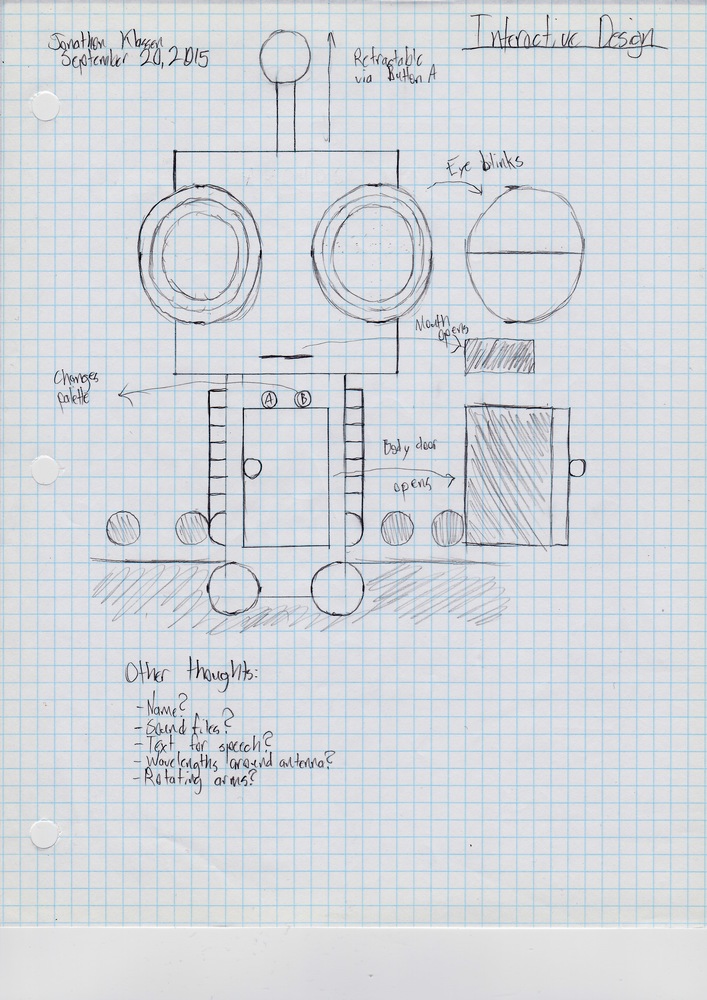
Robot Interactive Design
Author: Jonathon Klassen
Date: September 18, 2015
*/
int blink=0; //blinking randomizer
int r=0; //redness value
int w=200; //robot's main colour
float aY=170; //antenna Y coordinate
boolean deploy=false; //whether antenna is deployed
boolean heatUp=false; //whether robot is heating up
void setup() {
size(500, 500);
frameRate(10);
rectMode(CENTER);
}
void draw() {
drawBackground(); //function which draws background
stroke(r, r/2, 0);
drawBody(); //function which draws the body
blinking(); //function which handles blinking
mouth(); //function which handles opening/closing mouth
antenna(); //function which handles the antenna
overheat(); //function which handles the overheating aesthetic
openClose(); //function which handles opening/closing the body door
}
void drawBackground() {
background(120); //background
fill(80);
stroke(0);
rect(250, 460, 500, 100); //draw the ground
for (int i=1; i<8; i++) {
ellipse(70*i-25, 370, 20, 20); //draw background bolts
}
}
void drawBody() {
fill(w); //robot colour
strokeWeight(6);
rect(175, 360, 25, 90, 20); //draw arms
rect(275, 360, 25, 90, 20);
for (int i=0; i<3; i++) { //repeats the lines along the arms
line(162.5, 330+i*20, 287, 330+i*20); //lines on arms
}
ellipse(175, 405, 30, 30); //draw hands
ellipse(275, 405, 30, 30);
rect(225, 380, 90, 170, 10); //draw body
rect(225, aY, 10, 100); //draw antenna
fill(0, 131, 180);
ellipse(225, aY-35, 30, 10);
fill(w);
rect(225, 200, 200, 200, 50); //draw head
rect(225, 380, 60, 80, 10); //draw body door
ellipse(180, 450, 50, 50); //draw feet
ellipse(270, 450, 50, 50);
strokeWeight(4);
fill(w-140);
ellipse(205, 380, 10, 10); //draw door knob
for (int i=0; i<5; i++) { //for loop which draws the eyes/ gradient
stroke(r, 0, 0, 255-i*50);
fill(255);
ellipse(150, 200, 100-i*8, 100-i*8); //draw eyes
ellipse(300, 200, 100-i*8, 100-i*8);
textSize(20);
fill(w-90);
text("ARCHOS", 185, 140); //add name text
}
fill(w);
}
void blinking() {
if (blink == 0) { //if the blink randomizer is 0
ellipse (150, 200, 100, 100); //draw closed eyes over the eyes
ellipse (300, 200, 100, 100);
line (100, 200, 200, 200);
line (250, 200, 350, 200);
blink =int(random(0, 20)); //after which randomize the blink variable
} else {
blink = int(random(0, 20)); //if inequal to 0, keep randomizing the blink
}
}
void mouth() {
stroke(r, r/2, 0);
//if the mouth is clicked
if (mousePressed && mouseX >=200 && mouseX <=250 && mouseY >=260 && mouseY <=280) {
fill(0);
rect(225, 270, 45, 15); //draw the mouth open
textSize(20);
fill(5, 134, 10);
text("Feed me Seymour!", 310, 400); //print referential text
} else {
line(202.5, 270, 247.5, 270); //draw the mouth closed
}
//if the body door is clicked
if (mousePressed && mouseX >=195 && mouseX <= 255 && mouseY >=340 && mouseY <=420) {
line(202.5, 270, 182.5, 260); //draw the mouth smiling
line(247.5, 270, 267.5, 260);
}
}
void antenna() {
fill(0, 131, 180);
ellipse(210, 320, 10, 10); //draw antenna button
//if the antenna button is clicked
if (mousePressed && mouseX >=200 && mouseX <=220 && mouseY >=310 && mouseY <=330) {
deploy = !deploy; //deploy or retract antenna
}
//if the antenna should deploy and isn't at max. length
if (deploy == true && aY >=100) {
aY-=3; //extend the antenna
//if the antenna should retract and isn't at min. length
} else if (deploy == false && aY <=170) {
aY+=3; //retract the antenna
}
//if the antenna is fully deployed
if (aY <=100) {
//for loop which draws antenna waves
for (int i=0; i<10; i++) {
noFill();
stroke(0, 131, 180, 150-i*30);
ellipse(225, aY-35, 30+i*20, 10+i*20); //draw antenna waves
textSize(20);
fill(4, 95, 196);
text("I wonder how", 10, 60); //print text
text("much bandwith", 10, 80);
text("I get...", 10, 100);
stroke(r, r/2, 0);
}
}
}
void overheat() {
constrain(r, 0, 260); //ensure redness remains within 0 and 260
constrain(w, 200, 252); //ensure robot colour remains within 200 and 252
fill(255, 163, 13);
ellipse(240, 320, 10, 10); //draw overheat button
//if the overheat button is pressed
if (mousePressed && mouseX >=230 && mouseX <=250 && mouseY >=310 && mouseY <=330) {
heatUp = !heatUp; //overheat or cool robot
}
if (w >=252) { //if the robot is hot
textSize(30);
text("Hot! Hot! Hot!", 290, 70); //print text
}
//if the robot should overheat
if (heatUp == true && r<260 && w<252) {
//change colours to overheated ones
r+=10;
w+=2;
}
//if the robot should cool down
if (heatUp == false && r>0 & w>200) {
//restore default colours
r-=10;
w-=2;
}
}
void openClose() {
//if the body door is clicked
if (mousePressed && mouseX >=195 && mouseX <= 255 && mouseY >=340 && mouseY <=420) {
fill(w-100);
rect(225, 380, 60, 80, 10); //draw body cavity space
fill(w);
ellipse(260, 380, 10, 10); //draw body door knob open
rect(255, 380, 10, 80, 10); //draw body door open
textSize(20);
fill(193, 8, 8);
//print ominous text
text("That's not where I hid the bodies, tee hee.", 40, 30);
}
}{kind=link}