//marionet // doll
//joint locations
float headX;
float headY;
float bodyX;
float bodyY;
float waistX;
float waistY;
float lShoulderX;
float lShoulderY;
float lElbowX;
float lElbowY;
float lHandX;
float lHandY;
float rShoulderX;
float rShoulderY;
float rElbowX;
float rElbowY;
float rHandX;
float rHandY;
float lHipX;
float lHipY;
float rHipX;
float rHipY;
float lKneeX;
float lKneeY;
float rKneeX;
float rKneeY;
float lFootX;
float lFootY;
float rFootX;
float rFootY;
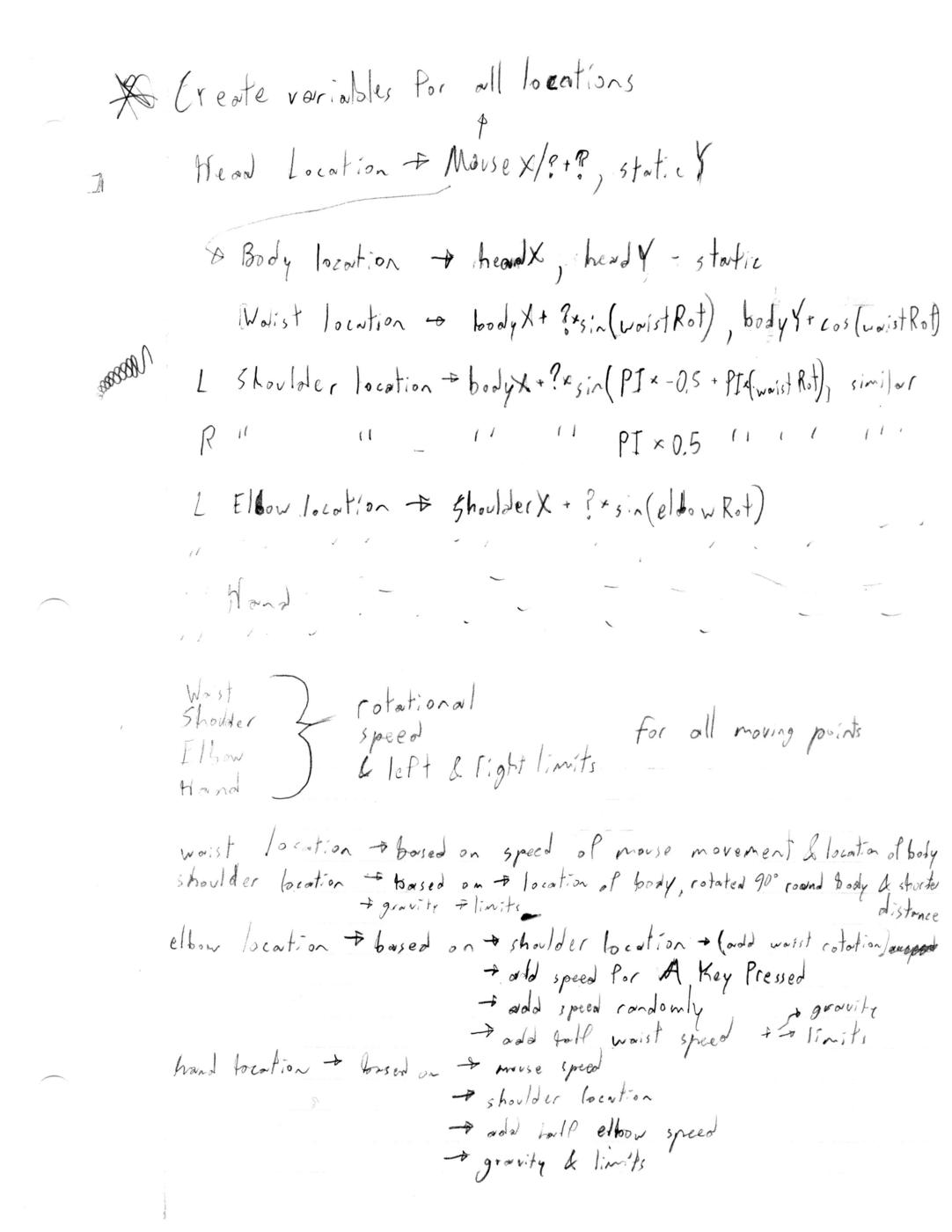
//joint location determining variables
//rotation
//speed
//left and right limits
//waist
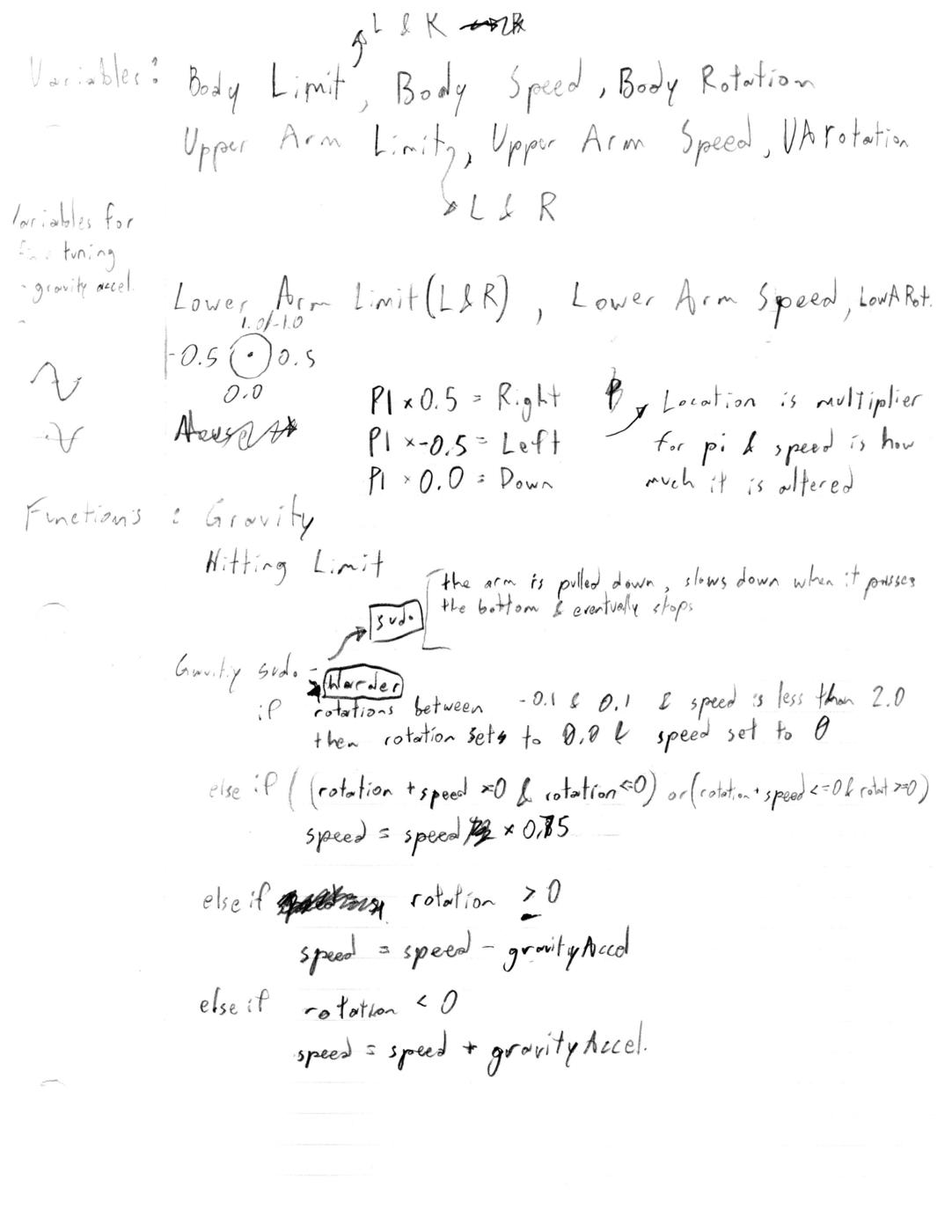
float waistRot = 0;
float waistSp = 0;
float waistLimL = -0.2;
float waistLimR = 0.2;
//left arm
//float lShoulderRot = waistRot - 0.5;
float lElbowRot = 0;
float lElbowSp = 0;
float lElbowLimL = -0.8;
float lElbowLimR = -0.3;
float lHandRot = 0;
float lHandSp = 0;
float lHandLimL = -0.5;
float lHandLimR = 0.5;
//right arm
//float rShoulderRot = waistRot + 0.5;
float rElbowRot = 0;
float rElbowSp = 0;
float rElbowLimL = 0.3;
float rElbowLimR = 0.8;
float rHandRot = 0;
float rHandSp = 0;
float rHandLimL = -0.5;
float rHandLimR = 0.5;
//left leg
float lHipRot = 0;
float lKneeRot = 0;
float lKneeSp = 0;
float lKneeLimL = -0.63;
float lKneeLimR = -0.1;
float lFootRot = 0;
float lFootSp = 0;
float lFootLimL = -0.5;
float lFootLimR = 0.3;
//right lig
float rHipRot = 0;
float rKneeRot = 0;
float rKneeSp = 0;
float rKneeLimL = 0.1;
float rKneeLimR = 0.63;
float rFootRot = 0;
float rFootSp = 0;
float rFootLimL = -0.3;
float rFootLimR = 0.5;
void setup() {
size(400, 400);
}
void draw() {
background(101, 131, 155);
drawStageBack();
doScaryMessyPhysics();
calculateXAndYLocations();
drawDoll();
drawStageFront();
println(mouseX, mouseY);
}
void drawDoll() {
//Strings
//lElbow string
stroke(245);
strokeWeight(1);
line(lElbowX,lElbowY,mouseX*0.45+110-40,30);
//lKnee string
stroke(245);
strokeWeight(1);
line(lKneeX,lKneeY,mouseX*0.45+110-20,30);
//rElbow string
stroke(245);
strokeWeight(1);
line(rElbowX,rElbowY,mouseX*0.45+110+40,30);
//rKnee string
stroke(245);
strokeWeight(1);
line(rKneeX,rKneeY,mouseX*0.45+110+20,30);
//Head string
stroke(245);
strokeWeight(1);
line(mouseX*0.45+110,132,mouseX*0.45+110,30);
//body
stroke(57);
strokeWeight(8);
line(mouseX*0.45+110, 140+15, mouseX*0.45+110+ waistX, 140+15+ waistY);
//shoulders
stroke(57);
strokeWeight(5);
line(lShoulderX, lShoulderY, rShoulderX, rShoulderY);
//lElbow
stroke(57);
strokeWeight(5);
line(lShoulderX, lShoulderY, lElbowX, lElbowY);
//rElbow
stroke(57);
strokeWeight(5);
line(rShoulderX, rShoulderY, rElbowX, rElbowY);
//lHand
stroke(57);
strokeWeight(5);
line(lElbowX, lElbowY, lHandX, lHandY);
//rHand
stroke(57);
strokeWeight(5);
line(rElbowX, rElbowY, rHandX, rHandY);
//lKnee
stroke(57);
strokeWeight(5);
line(lHipX, lHipY, lKneeX, lKneeY);
//rKnee
stroke(57);
strokeWeight(5);
line(rHipX, rHipY, rKneeX, rKneeY);
//lFoot
stroke(57);
strokeWeight(5);
line(lKneeX, lKneeY, lFootX, lFootY);
//rFoot
stroke(57);
strokeWeight(5);
line(rKneeX, rKneeY, rFootX, rFootY);
//joints
ellipseMode(CENTER);
noStroke();
strokeWeight(0);
fill(230);
//lKnee
//ellipse(lKneeX,lKneeY,1,1);
//rKnee
//ellipse(rKneeX,rKneeY,1,1);
//lElbow
//ellipse(lElbowX,lElbowY,1,1);
//rElbow
//ellipse(rElbowX,rElbowY,1,1);
//neck
stroke(111);
strokeWeight(4);
line(mouseX*0.45+110, 140+9, mouseX*0.45+110, 140+15);
//head
ellipseMode(CENTER);
noStroke();
strokeWeight(0);
fill(170);
ellipse(mouseX*0.45+110, 142, 16, 20);
//nose
fill(130);
//triangle(mouseX*0.45+110-2, 142+2,mouseX*0.45+110+2, 142+2,mouseX*0.45+110, 142-2);
}
//scrapped gravity function
/*void gravity(float r, float s) {
if (r>-0.003 && r<0.003 && s<0.001 && s>-0.001) {
rotation = 0;
speed = 0;
} else if ((r + s >= 0 && r <= 0) || (r + s <= 0 && r >= 0)) {
speed = speed *0.75;
} else if (r >0) {
speed = speed - 0.003;
} else if (r <0) {
speed = speed + 0.003;
}
}*/
//scrapped limit function
/*
void checkLimit(float r, float s, float ll, float rl) {
if (r+s > rl) {
speed = 0;
rotation = rl;
} else if (r+s < ll) {
speed = 0;
rotation = ll;
}
}
*/
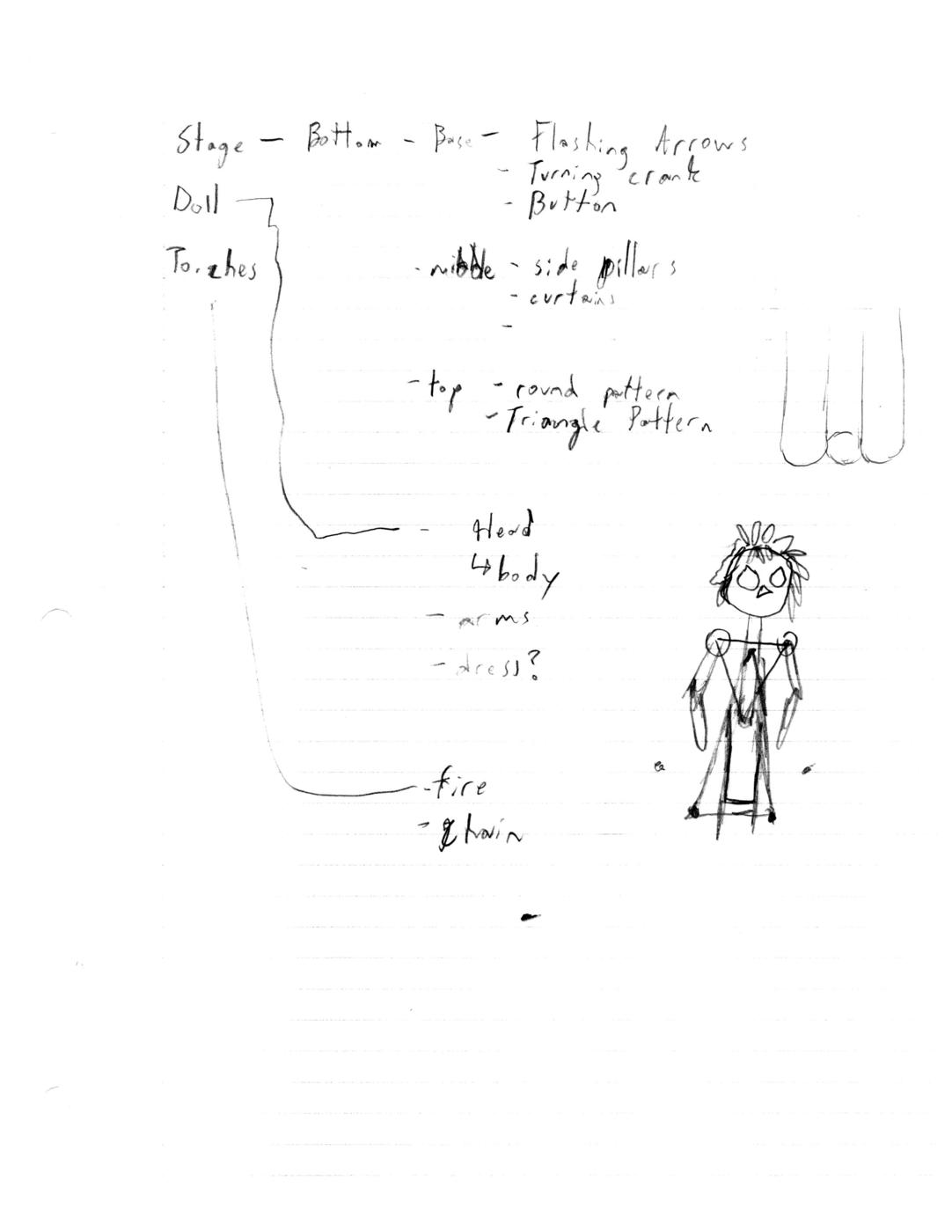
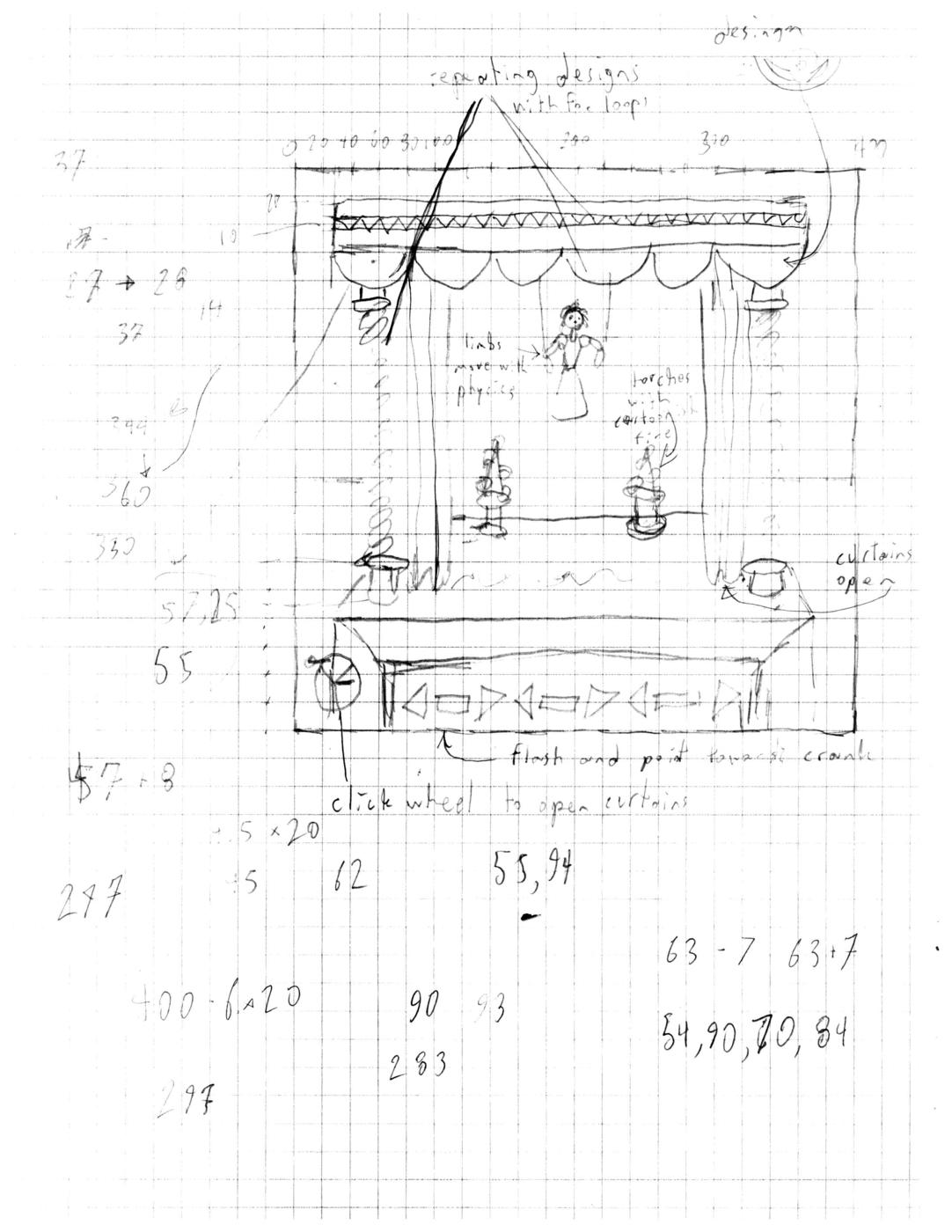
void drawStageBack() {
//stage backdrop
stroke(100, 62, 83);
strokeWeight(0);
fill(100, 62, 83);
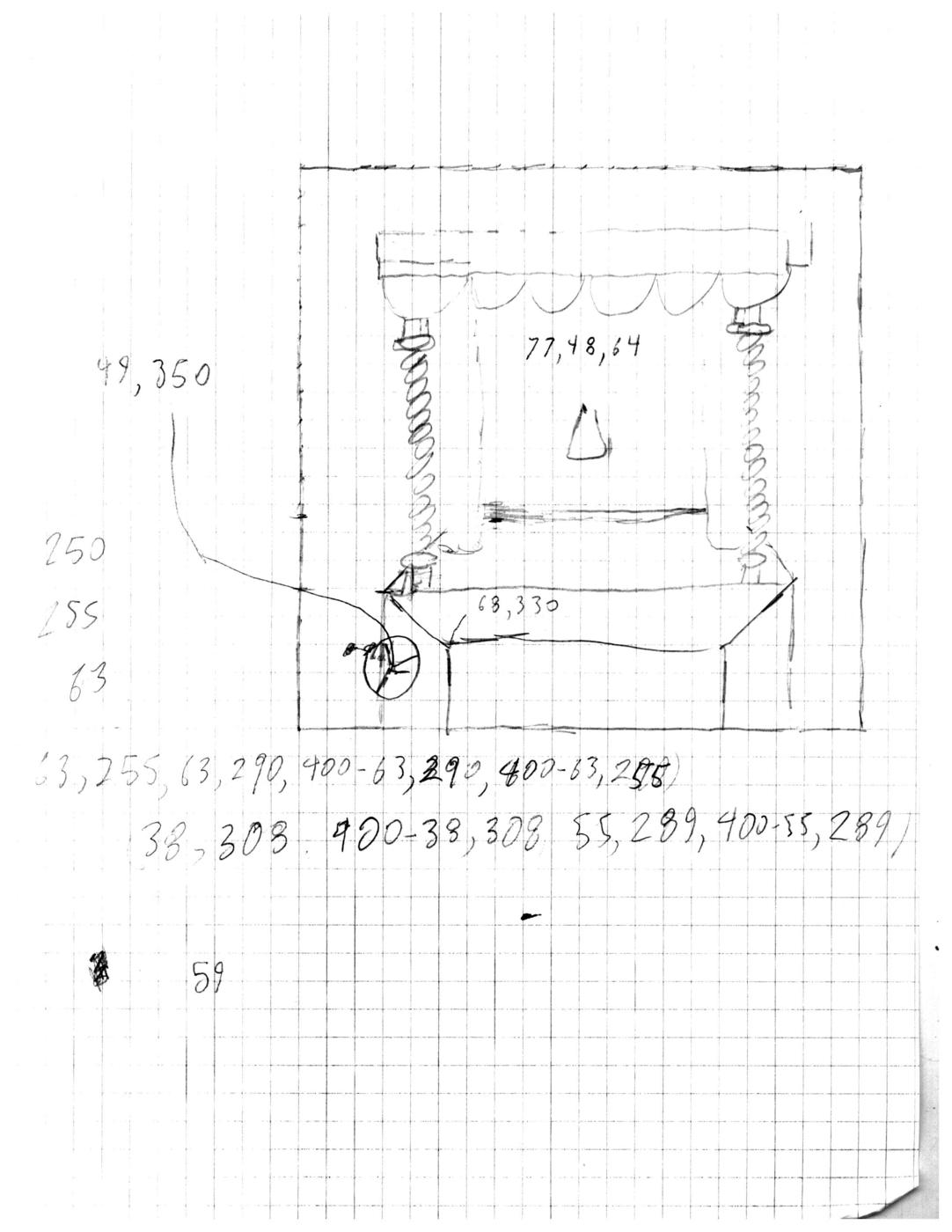
quad(63, 60, 400-63, 60, 400-63, 290, 63, 290);
//Stage Top
//outer
stroke(211, 189, 100);
strokeWeight(0);
fill(211, 189, 100);
quad(38, 308, 400-38, 308, 400-55, 289, 55, 289);
//inner
stroke(211, 189, 100);
strokeWeight(0);
fill(211, 189, 100);
quad(63, 255, 63, 290, 400-63, 290, 400-63, 255);
//stage front
//base
stroke(211, 189, 100);
strokeWeight(0);
fill(211, 189, 100);
quad(38, 308, 400-38, 308, 400-38, 400, 38, 400);
//front
stroke(191, 154, 62);
strokeWeight(0);
fill(191, 154, 62);
quad(68, 330, 68, 400, 400-68, 400, 400-68, 330);
//L side
stroke(243, 208, 140);
strokeWeight(0);
fill(243, 208, 140);
quad(68, 330, 68, 400, 38, 400, 38, 308);
//R side
stroke(147, 113, 27);
strokeWeight(0);
fill(147, 113, 27);
quad(400-68, 330, 400-68, 400, 400-38, 400, 400-38, 308);
}
void drawStageFront() {
//curtains//stage backdrop // light colour 227,34,63 // dark colour 173,7,79
stroke(227, 34, 63);
strokeWeight(0);
fill(227, 34, 63);
quad(60, 60, 100, 60, 100, 291, 60, 291);
quad(400-60, 60, 400-100, 60, 400-100, 291, 400-60, 291);
//pillar
//pillars
for (int n = 0; n < 25; n ++) {
stroke(191, 154, 62);
strokeWeight(8);
line(60, 90+8*n, 65, 84+8*n);
}
for (int n = 0; n < 25; n ++) {
stroke(191, 154, 62);
strokeWeight(8);
line(400-65, 90+8*n, 400-60, 84+8*n);
}
//base
//left top
rectMode(CENTER);
stroke(191, 154, 62);
strokeWeight(0);
fill(191, 154, 62);
rect(63+55*0, 80, 15, 27);
//right top
rectMode(CENTER);
stroke(191, 154, 62);
strokeWeight(0);
fill(191, 154, 62);
rect(63+55*5, 80, 15, 27);
//left bottom
rectMode(CENTER);
stroke(191, 154, 62);
strokeWeight(0);
fill(191, 154, 62);
rect(63+55*0, 400-110, 15, 13);
//right bottom
rectMode(CENTER);
stroke(191, 154, 62);
strokeWeight(0);
fill(191, 154, 62);
rect(63+55*5, 400-110, 15, 13);
//left bottom
ellipseMode(CENTER);
stroke(191, 154, 62);
strokeWeight(0);
fill(191, 154, 62);
ellipse(63+55*0, 297, 15, 13);
//right bottom
ellipseMode(CENTER);
stroke(191, 154, 62);
strokeWeight(0);
fill(191, 154, 62);
ellipse(63+55*5, 297, 15, 13);
//pillar rounds Top R
stroke(211, 189, 100);
strokeWeight(7);
line(55, 90, 70, 90);
//pillar rounds Top L
stroke(211, 189, 100);
strokeWeight(7);
line(400-55, 90, 400-70, 90);
//pillar rounds Bottom R
stroke(211, 189, 100);
strokeWeight(7);
line(55, 400-120, 70, 400-120);
//pillar rounds Bottom L
stroke(211, 189, 100);
strokeWeight(7);
line(400-55, 400-120, 400-70, 400-120);
//circle decor
//base
for (int n= 0; n <6; n++) {
ellipseMode(CENTER);
stroke(211, 189, 100);
strokeWeight(8);
fill(100, 182, 211);
ellipse(63+55*n, 60, 47, 27);
}
//blue
for (int n= 0; n <6; n++) {
ellipseMode(CENTER);
stroke(211, 189, 100);
strokeWeight(0);
fill(211, 189, 100);
ellipse(63+55*n, 60, 30, 19);
}
//red
for (int n= 0; n <6; n++) {
ellipseMode(CENTER);
stroke(211, 100, 102);
strokeWeight(0);
fill(211, 100, 102);
ellipse(63+55*n, 65, 7, 7);
}
//roof // lid
rectMode(CORNERS);
stroke(211, 189, 100);
strokeWeight(0);
fill(211, 189, 100);
rect(35, 23, 400-35, 60);
//triangle decor Red
for (int n= 0; n <16; n++) {
stroke(211, 100, 102);
strokeWeight(0);
fill(211, 100, 102);
triangle(35+n*20, 38, 55+n*20, 38, 45+n*20, 47);
triangle(355, 38, 365, 38, 365, 47);
}
//traingle decor Blue
for (int n= 0; n <16; n++) {
stroke(100, 182, 211);
strokeWeight(0);
fill(100, 182, 211);
triangle(45+n*20, 38, 55+n*20, 38, 45+n*20, 47);
//triangle(35,38,35,47,45,47);
}
}
void calculateXAndYLocations(){
//calc left shouler location
//lShoulderRot = waistRot - 0.5;
lShoulderX =mouseX*0.45+110+ 8.0*sin(PI*(waistRot - 0.5));
lShoulderY =140+15+ 8.0*cos(PI*(waistRot - 0.5));
//calc right shouler location
//rShoulderRot = waistRot + 0.5;
rShoulderX =mouseX*0.45+110+ 8.0*sin(PI*(waistRot + 0.5));
rShoulderY =140+15+ 8.0*cos(PI*(waistRot + 0.5));
//calc left hip location
lHipX =mouseX*0.45+110+ 42.0*sin(PI*(waistRot - 0.018));
lHipY =140+15+ 42.0*cos(PI*(waistRot - 0.018));
//calc right hip location
rHipX =mouseX*0.45+110+ 42.0*sin(PI*(waistRot + 0.018));
rHipY =140+15+ 42.0*cos(PI*(waistRot + 0.018));
//calc lElbow location
lElbowX =lShoulderX+ 16.0*sin(PI*lElbowRot);
lElbowY =lShoulderY+ 16.0*cos(PI*lElbowRot);
//calc rElbow location
rElbowX =rShoulderX+ 16.0*sin(PI*rElbowRot);
rElbowY =rShoulderY+ 16.0*cos(PI*rElbowRot);
//calc lHand location
lHandX =lElbowX+ 19.0*sin(PI*lHandRot);
lHandY =lElbowY+ 19.0*cos(PI*lHandRot);
//calc rHand location
rHandX =rElbowX+ 19.0*sin(PI*rHandRot);
rHandY =rElbowY+ 19.0*cos(PI*rHandRot);
//calc lKnee location
lKneeX =lHipX+ 19.0*sin(PI*lKneeRot);
lKneeY =lHipY+ 19.0*cos(PI*lKneeRot);
//calc rKnee location
rKneeX =rHipX+ 19.0*sin(PI*rKneeRot);
rKneeY =rHipY+ 19.0*cos(PI*rKneeRot);
//calc lFoot location
lFootX =lKneeX+ 19.0*sin(PI*lFootRot);
lFootY =lKneeY+ 19.0*cos(PI*lFootRot);
//calc rFoot location
rFootX =rKneeX+ 19.0*sin(PI*rFootRot);
rFootY =rKneeY+ 19.0*cos(PI*rFootRot);
// base line calc code
// l(X, Y, X+(*)*sin(PI*Rot), Y + (*)*cos(PI*Rot));
}
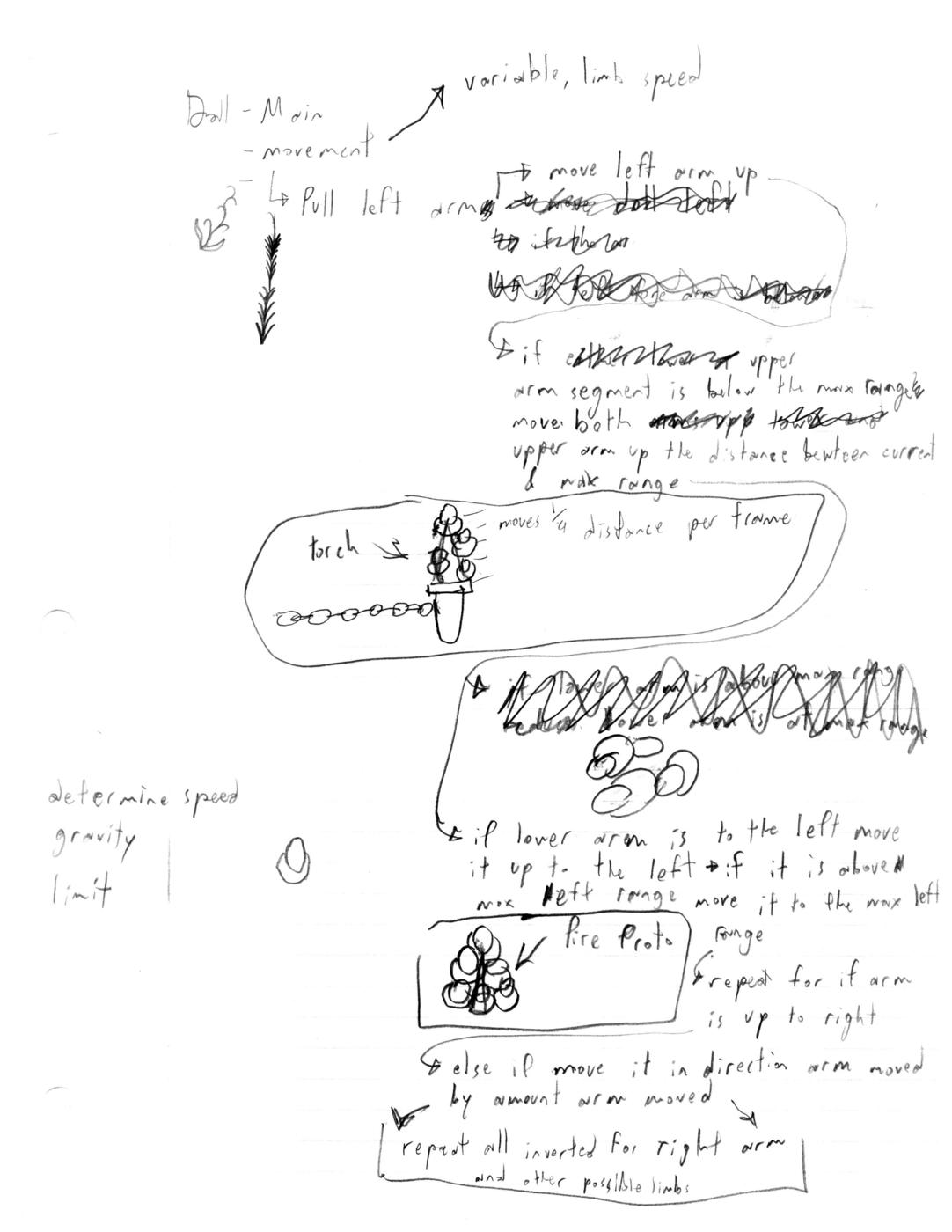
void doScaryMessyPhysics() {
//gravity code
/*
if (**Rot>-0.003 && **Rot<0.003 && **Sp<0.001 && **Sp>-0.001) {
**Rot = 0;
**Sp = 0;
} else if ((**Rot + **Sp >= 0 && **Rot <= 0) || (**Rot + **Sp <= 0 && **Rot >= 0)) {
**Sp = **Sp *0.75;
} else if (**Rot >0) {
**Sp = **Sp - 0.003;
} else if (**Rot <0) {
**Sp = **Sp + 0.003;
}
*/
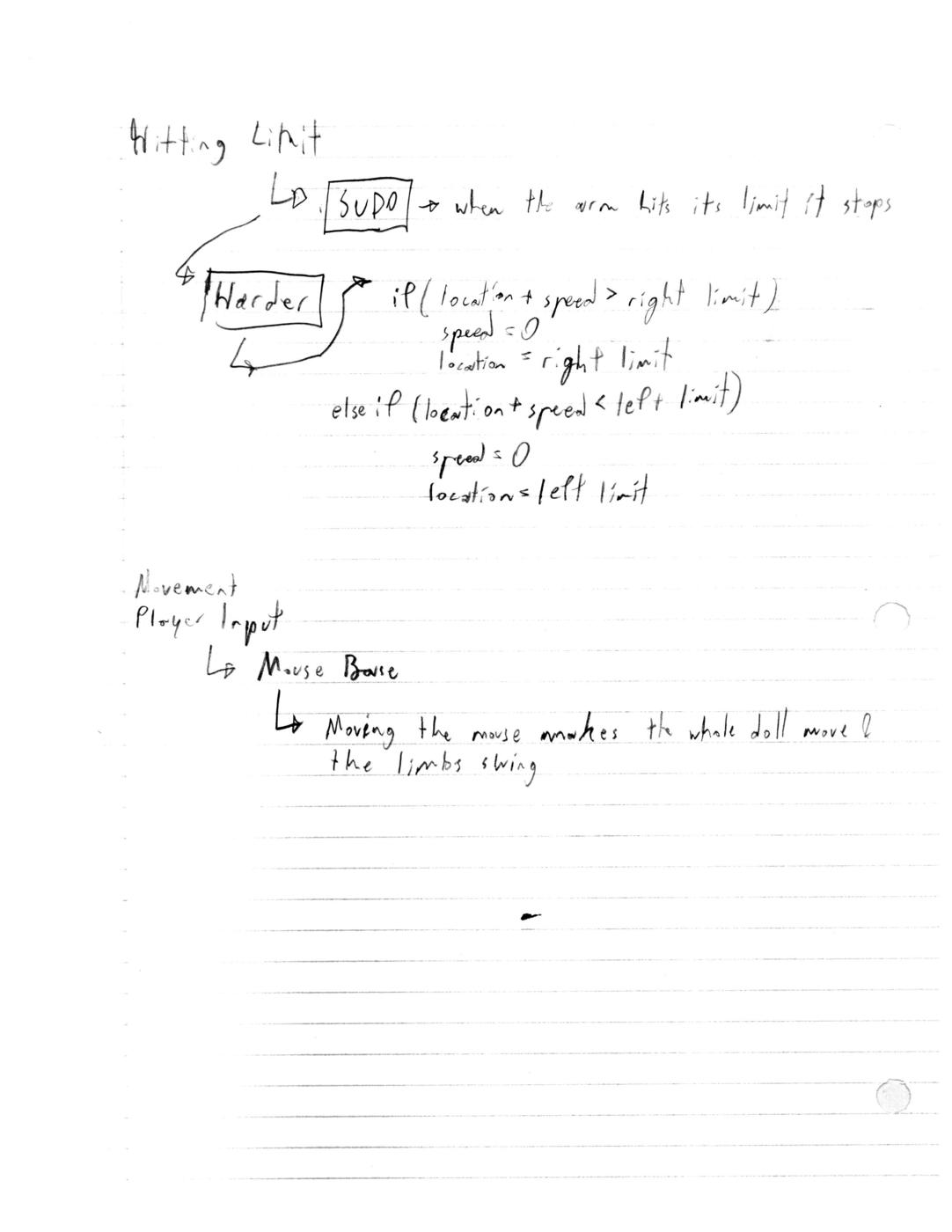
//limit hit code
/*
if (**Rot+**Sp > r**Lim) {
**Sp = 0;
**Rot = **Lim;
} else if (**Rot+**Sp < l**Lim) {
**Sp = 0;
**Rot = l**Lim;
}
*/
//calc waist
//calc waist speed
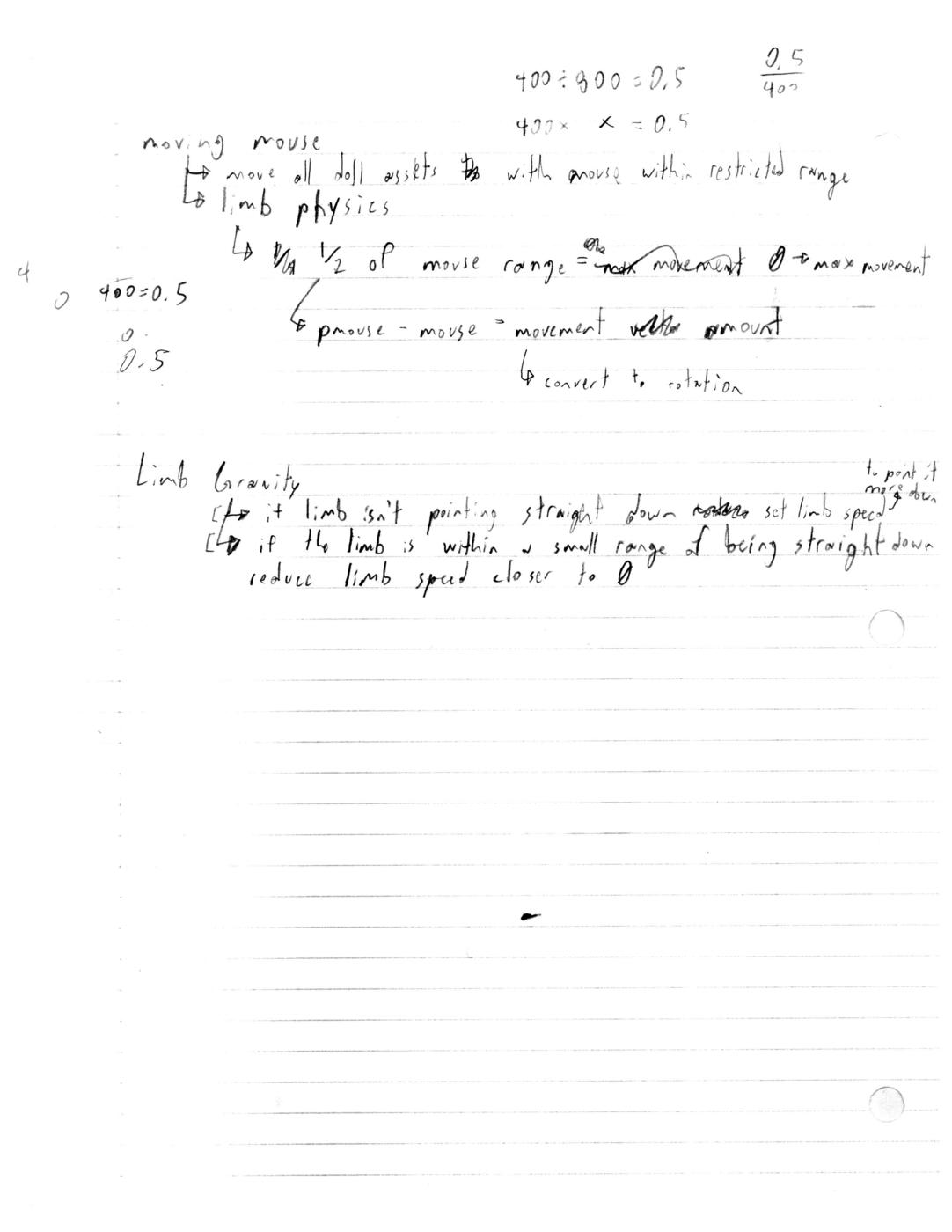
waistSp = waistSp + (pmouseX - mouseX)/1200.0;
//add a random twitch to the doll
if (waistSp == 0) {
if (random (0, 600) > 598) {
waistSp = 0.018;
}
}
//calc apply speed to rotation
waistRot = waistRot +waistSp;
// hold movement inside limit
if (waistRot+waistSp > waistLimR) {
waistSp = 0;
waistRot = waistLimR;
} else if (waistRot+waistSp < waistLimL) {
waistSp = 0;
waistRot = waistLimL;
}
//apply gravity
if (waistRot>-0.003 && waistRot<0.003 && waistSp<0.001 && waistSp>-0.001) {
waistRot = 0;
waistSp = 0;
} else if ((waistRot + waistSp >= 0 && waistRot <= 0) || (waistRot + waistSp <= 0 && waistRot >= 0)) {
waistSp = waistSp *0.75;
} else if (waistRot >0) {
waistSp = waistSp - 0.003;
} else if (waistRot <0) {
waistSp = waistSp + 0.003;
}
waistX = 40.0*sin(PI*waistRot);
waistY = 40.0*cos(PI*waistRot);
//calc lElbow
//calc lElbow speed
lElbowSp = lElbowSp + (pmouseX - mouseX)/1200.0;
//calc apply speed to rotation
lElbowRot = lElbowRot +lElbowSp;
// hold movement inside limit
if (lElbowRot+lElbowSp > lElbowLimR) {
lElbowSp = 0;
lElbowRot = lElbowLimR;
} else if (lElbowRot+lElbowSp < lElbowLimL) {
lElbowSp = 0;
lElbowRot = lElbowLimL;
}
//apply gravity
if (lElbowRot>-0.003 && lElbowRot<0.003 && lElbowSp<0.001 && lElbowSp>-0.001) {
lElbowRot = 0;
lElbowSp = 0;
} else if ((lElbowRot + lElbowSp >= 0 && lElbowRot <= 0) || (lElbowRot + lElbowSp <= 0 && lElbowRot >= 0)) {
lElbowSp = lElbowSp *0.75;
} else if (lElbowRot >0) {
lElbowSp = lElbowSp - 0.003;
} else if (lElbowRot <0) {
lElbowSp = lElbowSp + 0.003;
}
//calc lHand speed
lHandSp = lHandSp + (pmouseX - mouseX)/1200.0;
//add a random twitch to the doll
if (lHandSp == 0) {
if (random (0, 600) > 598) {
lHandSp = 0.018;
}
}
//calc apply speed to rotation
lHandRot = lHandRot +lHandSp;
// hold movement inside limit
if (lHandRot+lHandSp > lHandLimR) {
lHandSp = 0;
lHandRot = lHandLimR;
} else if (lHandRot+lHandSp < lHandLimL) {
lHandSp = 0;
lHandRot = lHandLimL;
}
//apply gravity
if (lHandRot>-0.003 && lHandRot<0.003 && lHandSp<0.001 && lHandSp>-0.001) {
lHandRot = 0;
lHandSp = 0;
} else if ((lHandRot + lHandSp >= 0 && lHandRot <= 0) || (lHandRot + lHandSp <= 0 && lHandRot >= 0)) {
lHandSp = lHandSp *0.75;
} else if (lHandRot >0) {
lHandSp = lHandSp - 0.003;
} else if (lHandRot <0) {
lHandSp = lHandSp + 0.003;
}
//calc rElbow
//calc rElbow speed
rElbowSp = rElbowSp + (pmouseX - mouseX)/1200.0;
//calc apply speed to rotation
rElbowRot = rElbowRot +rElbowSp;
// hold movement inside limit
if (rElbowRot+rElbowSp > rElbowLimR) {
rElbowSp = 0;
rElbowRot = rElbowLimR;
} else if (rElbowRot+rElbowSp < rElbowLimL) {
rElbowSp = 0;
rElbowRot = rElbowLimL;
}
//apply gravity
if (rElbowRot>-0.003 && rElbowRot<0.003 && rElbowSp<0.001 && rElbowSp>-0.001) {
rElbowRot = 0;
rElbowSp = 0;
} else if ((rElbowRot + rElbowSp >= 0 && rElbowRot <= 0) || (rElbowRot + rElbowSp <= 0 && rElbowRot >= 0)) {
rElbowSp = rElbowSp *0.75;
} else if (rElbowRot >0) {
rElbowSp = rElbowSp - 0.003;
} else if (rElbowRot <0) {
rElbowSp = rElbowSp + 0.003;
}
//calc rHand speed
rHandSp = rHandSp + (pmouseX - mouseX)/1200.0;
//add a random twitch to the doll
if (rHandSp == 0) {
if (random (0, 600) > 598) {
rHandSp = 0.018;
}
}
//calc apply speed to rotation
rHandRot = rHandRot +rHandSp;
// hold movement inside limit
if (rHandRot+rHandSp > rHandLimR) {
rHandSp = 0;
rHandRot = rHandLimR;
} else if (rHandRot+rHandSp < rHandLimL) {
rHandSp = 0;
rHandRot = rHandLimL;
}
//apply gravity
if (rHandRot>-0.003 && rHandRot<0.003 && rHandSp<0.001 && rHandSp>-0.001) {
rHandRot = 0;
rHandSp = 0;
} else if ((rHandRot + rHandSp >= 0 && rHandRot <= 0) || (rHandRot + rHandSp <= 0 && rHandRot >= 0)) {
rHandSp = rHandSp *0.75;
} else if (rHandRot >0) {
rHandSp = rHandSp - 0.003;
} else if (rHandRot <0) {
rHandSp = rHandSp + 0.003;
}
//calc rKnee
//calc rKnee speed
rKneeSp = rKneeSp + (pmouseX - mouseX)/1200.0;
//calc apply speed to rotation
rKneeRot = rKneeRot +rKneeSp;
// hold movement inside limit
if (rKneeRot+rKneeSp > rKneeLimR) {
rKneeSp = 0;
rKneeRot = rKneeLimR;
} else if (rKneeRot+rKneeSp < rKneeLimL) {
rKneeSp = 0;
rKneeRot = rKneeLimL;
}
//apply gravity
if (rKneeRot>-0.003 && rKneeRot<0.003 && rKneeSp<0.001 && rKneeSp>-0.001) {
rKneeRot = 0;
rKneeSp = 0;
} else if ((rKneeRot + rKneeSp >= 0 && rKneeRot <= 0) || (rKneeRot + rKneeSp <= 0 && rKneeRot >= 0)) {
rKneeSp = rKneeSp *0.75;
} else if (rKneeRot >0) {
rKneeSp = rKneeSp - 0.003;
} else if (rKneeRot <0) {
rKneeSp = rKneeSp + 0.003;
}
//calc lKnee speed
lKneeSp = lKneeSp + (pmouseX - mouseX)/1200.0;
//calc apply speed to rotation
lKneeRot = lKneeRot +lKneeSp;
// hold movement inside limit
if (lKneeRot+lKneeSp > lKneeLimR) {
lKneeSp = 0;
lKneeRot = lKneeLimR;
} else if (lKneeRot+lKneeSp < lKneeLimL) {
lKneeSp = 0;
lKneeRot = lKneeLimL;
}
//apply gravity
if (lKneeRot>-0.003 && lKneeRot<0.003 && lKneeSp<0.001 && lKneeSp>-0.001) {
lKneeRot = 0;
lKneeSp = 0;
} else if ((lKneeRot + lKneeSp >= 0 && lKneeRot <= 0) || (lKneeRot + lKneeSp <= 0 && lKneeRot >= 0)) {
lKneeSp = lKneeSp *0.75;
} else if (lKneeRot >0) {
lKneeSp = lKneeSp - 0.003;
} else if (lKneeRot <0) {
lKneeSp = lKneeSp + 0.003;
}
//calc lFoot speed
lFootSp = lFootSp + (pmouseX - mouseX)/1200.0;
//calc apply speed to rotation
lFootRot = lFootRot +lFootSp;
// hold movement inside limit
if (lFootRot+lFootSp > lFootLimR) {
lFootSp = 0;
lFootRot = lFootLimR;
} else if (lFootRot+lFootSp < lFootLimL) {
lFootSp = 0;
lFootRot = lFootLimL;
}
//apply gravity
if (lFootRot>-0.003 && lFootRot<0.003 && lFootSp<0.001 && lFootSp>-0.001) {
lFootRot = 0;
lFootSp = 0;
} else if ((lFootRot + lFootSp >= 0 && lFootRot <= 0) || (lFootRot + lFootSp <= 0 && lFootRot >= 0)) {
lFootSp = lFootSp *0.75;
} else if (lFootRot >0) {
lFootSp = lFootSp - 0.003;
} else if (lFootRot <0) {
lFootSp = lFootSp + 0.003;
}
//calc rFoot speed
rFootSp = rFootSp + (pmouseX - mouseX)/1200.0;
//calc apply speed to rotation
rFootRot = rFootRot +rFootSp;
// hold movement inside limit
if (rFootRot+rFootSp > rFootLimR) {
rFootSp = 0;
rFootRot = rFootLimR;
} else if (rFootRot+rFootSp < rFootLimL) {
rFootSp = 0;
rFootRot = rFootLimL;
}
//apply gravity
if (rFootRot>-0.003 && rFootRot<0.003 && rFootSp<0.001 && rFootSp>-0.001) {
rFootRot = 0;
rFootSp = 0;
} else if ((rFootRot + rFootSp >= 0 && rFootRot <= 0) || (rFootRot + rFootSp <= 0 && rFootRot >= 0)) {
rFootSp = rFootSp *0.75;
} else if (rFootRot >0) {
rFootSp = rFootSp - 0.003;
} else if (rFootRot <0) {
rFootSp = rFootSp + 0.003;
}
}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}