//Interactive Toy Robot created by Tyler Moretto
//Exhaust Idea from Nicolas Hesler's Cylon Lander
float robotX;
float robotY;
float robotSpeedX;
float robotSpeedY;
float robotExhaustFlamesSize;
float robotExhaustFlamesExtra;
float robotExhaustFlamesAmount;
float gravity=.015;
//Setup the basic canvas
void setup() {
frameRate(60);
size(400, 400);
//Robot Starting Position
robotX=width/2;
robotY=height/2;
//Robot Starting Speed;
robotSpeedX=0;
robotSpeedY=0;
}
//Create each function on the screen
void draw() {
robotSpeed();
robotFallSpeed();
robotPosition();
robotOnScreen();
robotFuel();
drawBackground();
drawStars(130, 10, 1);
drawStars(290, 30, 1);
drawStars(50, 50, 1);
drawStars(230, 70, 1);
drawStars(140, 100, 1);
drawStars(350, 110, 1);
drawStars(280, 120, 1);
drawStars(80, 140, 1);
drawStars(20, 160, 1);
drawStars(240, 180, 1);
drawStars(370, 210, 1);
drawStars(80, 240, 1);
drawStars(300, 280, 1);
drawStars(100, 310, 1);
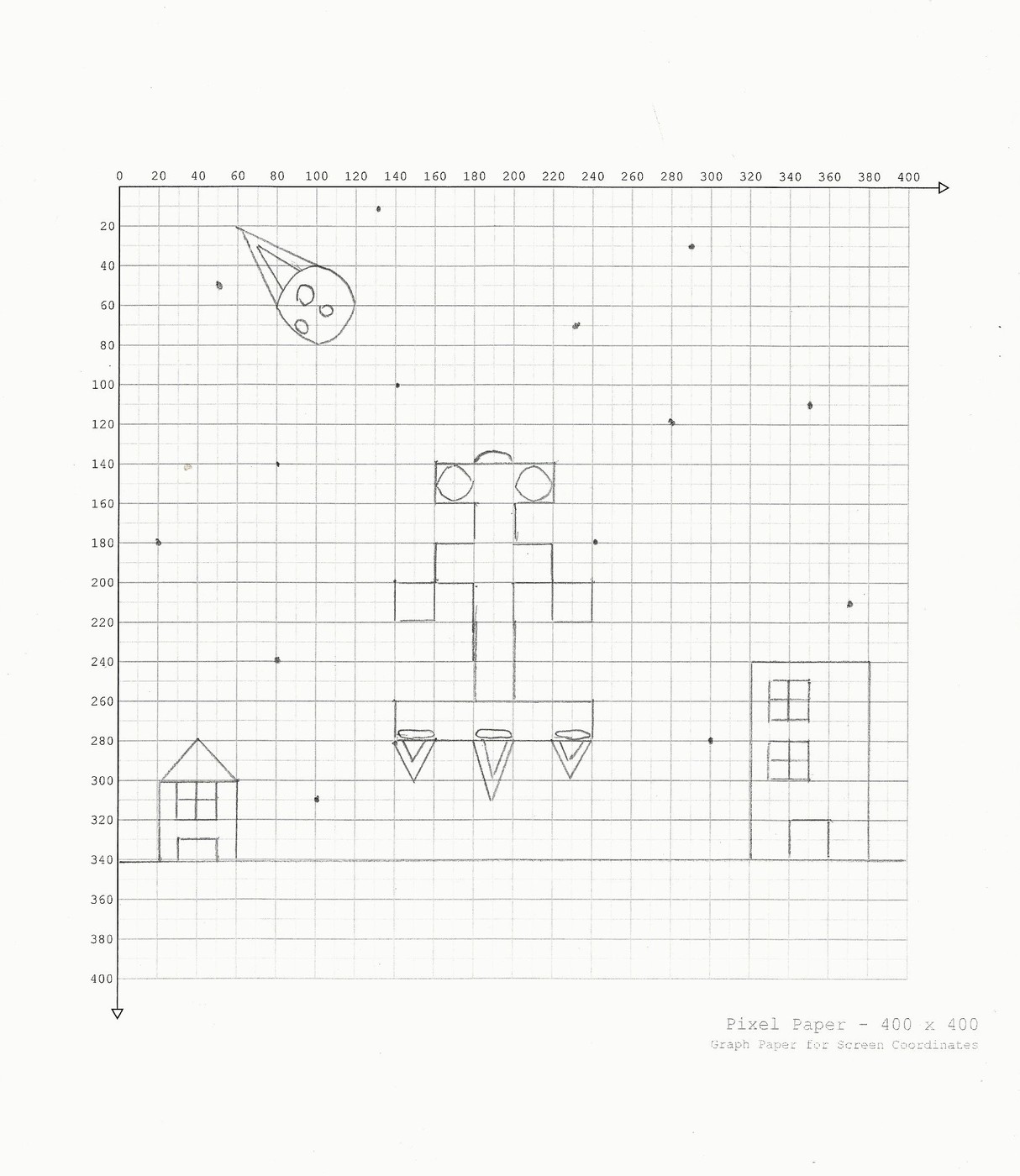
drawGround();
drawHouse();
drawBuilding();
drawAsteroid(100, 60, 10, color(150));
drawAsteroid(260, 90, 0, color(150));
drawAsteroid(50, 140, 5, color(150));
drawRobot();
robotMovingHands();
}
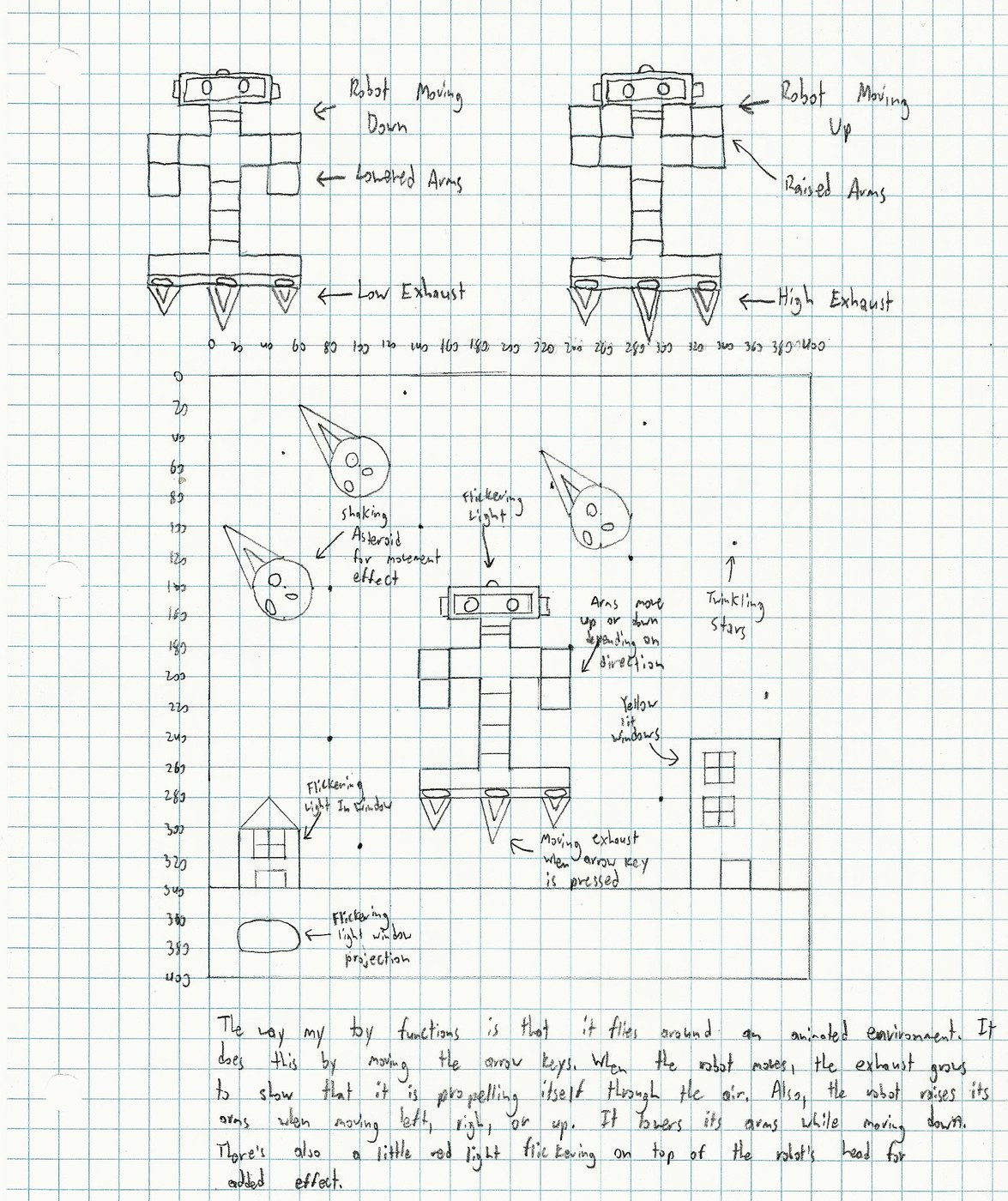
//Changes the horizontal and vertical speed of the robot depending on the key that is pressed
void robotSpeed() {
if (keyCode==UP) {
robotSpeedY+=-.06;
} else if (keyCode==RIGHT) {
robotSpeedX+=.03;
} else if (keyCode==LEFT) {
robotSpeedX+=-.03;
} else if (keyCode==DOWN) {
robotSpeedY+=.04;
}
}
//How Fast the Robot Falls From the Air when Descending
void robotFallSpeed() {
robotSpeedY+=gravity;
}
//Change Robot Position or Make the Robot Move
void robotPosition() {
robotX+=robotSpeedX;
robotY+=robotSpeedY;
}
//Keep Robot on the Screen so that it can Always be Seen
void robotOnScreen() {
if (robotX>width) {
robotSpeedX=0;
robotX=width;
} else if (robotX<0) {
robotSpeedX=0;
robotX=0;
}
if (robotY>height) {
robotSpeedY=0;
robotSpeedX=0;
robotY=height;
} else if (robotY<0) {
robotSpeedY=0;
robotY=0;
}
}
//Use Exhaust When Robot is Moving (Flames Grow Bigger than when Stationary)
void robotFuel() {
if (keyPressed) {
robotExhaustFlamesAmount=random(15, 30);
robotExhaustFlamesSize=20;
robotExhaustFlamesExtra=15;
} else {
robotExhaustFlamesAmount=random(3, 9);
robotExhaustFlamesSize=12;
robotExhaustFlamesExtra=5;
}
}
//Draw Background (Colour the Background Black)
void drawBackground() {
background(0);
}
//Draw Flashing Stars in the Background
void drawStars(int x, int y, int size) {
float offset = size/1.5;
stroke(random(50, 255));
point(x - offset, y - offset);
}
//Draw the Ground
void drawGround() {
stroke(0);
fill(0, 0, 100);
rect(0, 340, 400, 60);
}
//Draw a House in the Background
void drawHouse() {
//Draw House Body
noStroke();
fill(50);
rect(20, 300, 40, 40);
//Draw House Door
fill(0);
rect(30, 330, 20, 10);
//Draw House Roof
fill(30);
triangle(20, 300, 40, 280, 60, 300);
//Draw House Window
fill(random(200, 255), random(200, 255), random(0, 1));
rect(30, 300, 20, 20);
stroke(0);
line(40, 300, 40, 320);
line(30, 310, 50, 310);
//Draw Window Light Reflection on Ground
noStroke();
fill(random(150, 200), random(150, 200), random(0, 1));
ellipse(40, 370, 40, 20);
}
//Draw a Building in the Background
void drawBuilding() {
//Draw Building Body
noStroke();
fill(60);
rect(320, 240, 60, 100);
// Draw Building Door
fill(0);
rect(340, 320, 20, 20);
//Draw Building Windows
fill(150, 150, 0);
rect(330, 250, 20, 20);
stroke(0);
line(340, 250, 340, 270);
line(330, 260, 350, 260);
noStroke();
fill(100, 100, 0);
rect(330, 280, 20, 20);
stroke(0);
line(340, 280, 340, 300);
line(330, 290, 350, 290);
}
//Create Asteroids in the Air
void drawAsteroid(int asteroidX, int asteroidY, int size, color c) {
float offset = size/2;
//Draw Asteroid Flames
fill(255, 255, 0);
triangle(asteroidX - offset - 10, asteroidY - offset, asteroidX - offset - random(20, 40), asteroidY - offset - random(20, 40), asteroidX - offset, asteroidY - 15);
fill(255, 165, 0);
triangle(asteroidX - offset - 5, asteroidY - offset, asteroidX - offset - random(10, 25), asteroidY - offset - random(10, 25), asteroidX - offset, asteroidY - 10);
//Draw Asteroid
noStroke();
fill(c);
ellipse(asteroidX, asteroidY, random(30, 40), random(30, 40));
//Draw Asteroid Craters
fill(0);
ellipse(asteroidX - offset - random(1, 5), asteroidY - offset - random(3, 5), 10, 10);
ellipse(asteroidX - offset + random(1, 5), asteroidY - offset + random(1, 2.5), 7, 5);
ellipse(asteroidX - offset - random(4, 8), asteroidY - offset + random(7, 12), 8, 7);
}
//Create the Robot
void drawRobot() {
//Draw Robot Body
stroke(0);
fill(230);
rect(robotX, robotY, 20, 100);
line(robotX, robotY + 90, robotX + 20, robotY + 90);
line(robotX, robotY + 75, robotX + 20, robotY + 75);
line(robotX, robotY + 60, robotX + 20, robotY + 60);
fill(0);
rect(robotX, robotY + 7, 20, 5);
//Draw Robot Fuel Tank
fill(230);
rect(robotX - 40, robotY + 100, 100, 20);
fill(150, 0, 0);
rect(robotX - 40, robotY + 120, 100, 5);
fill(0);
ellipse(robotX - 30, robotY + 123, 18, 4);
ellipse(robotX + 10, robotY + 123, 18, 4);
ellipse(robotX + 50, robotY + 123, 18, 4);
//Draw Robot Arms
fill(230);
rect(robotX - 20, robotY + 25, 60, 20);
fill(150, 0, 0);
rect(robotX - 40, robotY + 25, 20, 20);
rect(robotX + 40, robotY + 25, 20, 20);
//Draw Robot Light
fill(random(150, 255), random(0, 1), random(0, 1));
ellipse(robotX + 10, robotY - 15, 5, 5);
//Draw Robot Head
fill(230);
rect(robotX - 20, robotY - 15, 60, 20);
fill(0);
rect(robotX - 18, robotY - 12, 55, 15);
fill(230);
rect(robotX - 25, robotY - 10, 5, 10);
rect(robotX + 40, robotY - 10, 5, 10);
//Draw Robot Eyes
fill(255, 0, 0);
ellipse(robotX - 5, robotY - 5, 12, 12);
ellipse(robotX + 25, robotY - 5, 12, 12);
//Draw Robot Exhaust Flames
fill(255, 255, 0);
triangle(robotX - robotExhaustFlamesSize/2 - 35, robotY + 123, robotX + robotExhaustFlamesSize/2 - 20, robotY + 123, robotX - 27.5, robotY + robotExhaustFlamesAmount + robotExhaustFlamesExtra/2 + 130);
fill(255, 165, 0);
triangle(robotX - robotExhaustFlamesSize/2 + robotExhaustFlamesSize/4 - 35, robotY + 123, robotX + robotExhaustFlamesSize/2 + robotExhaustFlamesSize/4 - 28, robotY + 123, robotX - 27.5, robotY + robotExhaustFlamesAmount/3 + robotExhaustFlamesExtra/2 + 130);
fill(255, 255, 0);
triangle(robotX - robotExhaustFlamesSize/2 + 5, robotY + 123, robotX + robotExhaustFlamesSize/2 + 15, robotY + 123, robotX + 10, robotY + robotExhaustFlamesAmount + robotExhaustFlamesExtra + 130);
fill(255, 165, 0);
triangle(robotX - robotExhaustFlamesSize/2 + robotExhaustFlamesSize/4 + 5, robotY + 123, robotX + robotExhaustFlamesSize/2 + robotExhaustFlamesSize/4 + 8, robotY + 123, robotX + 10, robotY + robotExhaustFlamesAmount/3 + robotExhaustFlamesExtra + 130);
fill(255, 255, 0);
triangle(robotX - robotExhaustFlamesSize/2 + 40, robotY + 123, robotX + robotExhaustFlamesSize/2 + 55, robotY + 123, robotX + 50, robotY + robotExhaustFlamesAmount + robotExhaustFlamesExtra/2 + 130);
fill(255, 165, 0);
triangle(robotX - robotExhaustFlamesSize/2 + robotExhaustFlamesSize/4 + 40, robotY + 123, robotX + robotExhaustFlamesSize/2 + robotExhaustFlamesSize/4 + 48, robotY + 123, robotX + 49, robotY + robotExhaustFlamesAmount/3 + robotExhaustFlamesExtra/2 + 130);
}
//Move Robot Hands Up as Robot Ascends or moves Horizontally
void robotMovingHands() {
fill(150, 0, 0);
if (keyCode==UP) {
rect(robotX - 40, robotY + 5, 20, 20);
rect(robotX + 40, robotY + 5, 20, 20);
} else if (keyCode==RIGHT) {
rect(robotX - 40, robotY + 5, 20, 20);
rect(robotX + 40, robotY + 5, 20, 20);
} else if (keyCode==LEFT) {
rect(robotX - 40, robotY + 5, 20, 20);
rect(robotX + 40, robotY + 5, 20, 20);
} else {
rect(robotX - 40, robotY + 45, 20, 20);
rect(robotX + 40, robotY + 45, 20, 20);
}
}
{kind=link}
{kind=link}
{kind=link}