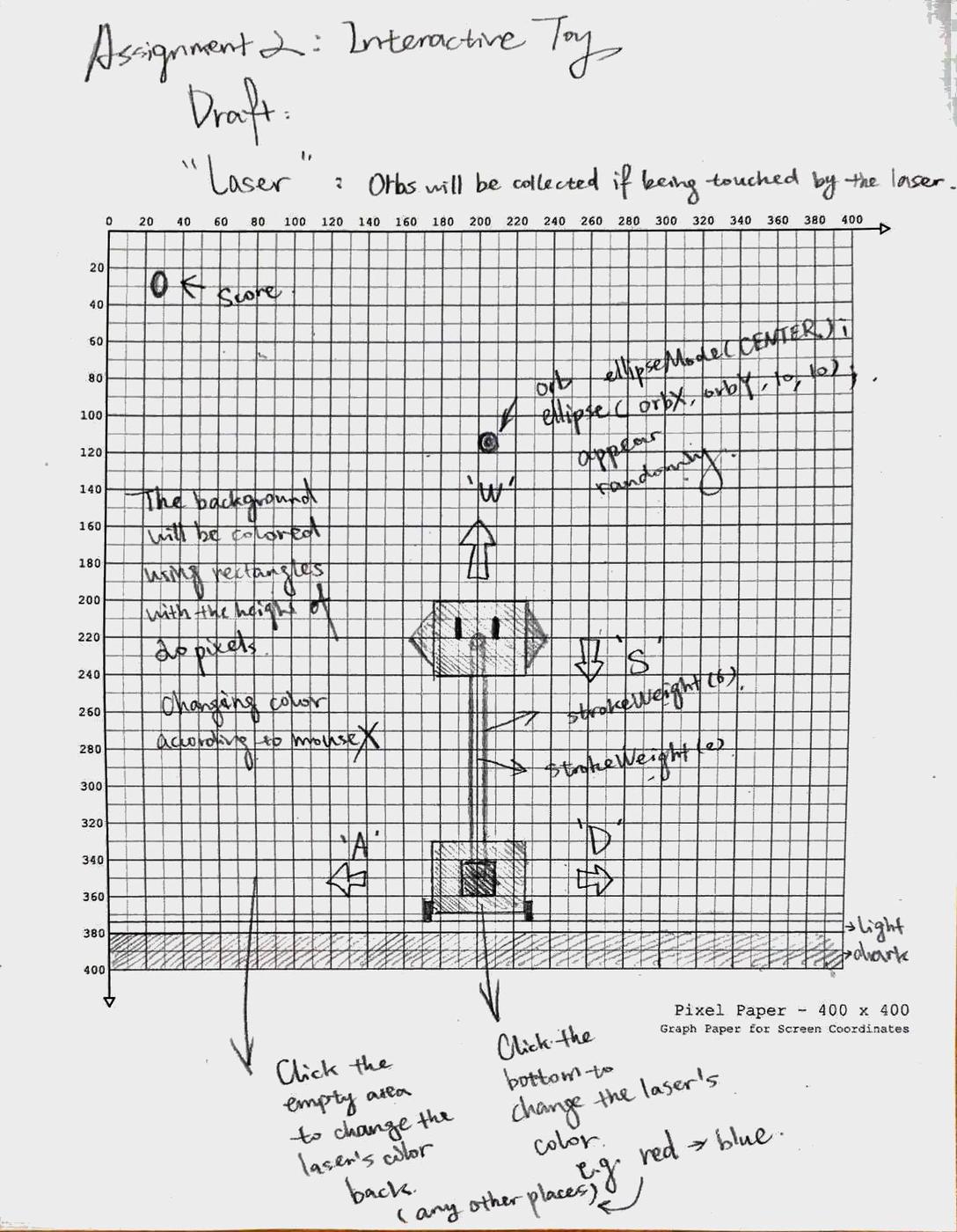
/* Assignment 2: Interactive Toy
"Laser"
BY: Alina Zhang
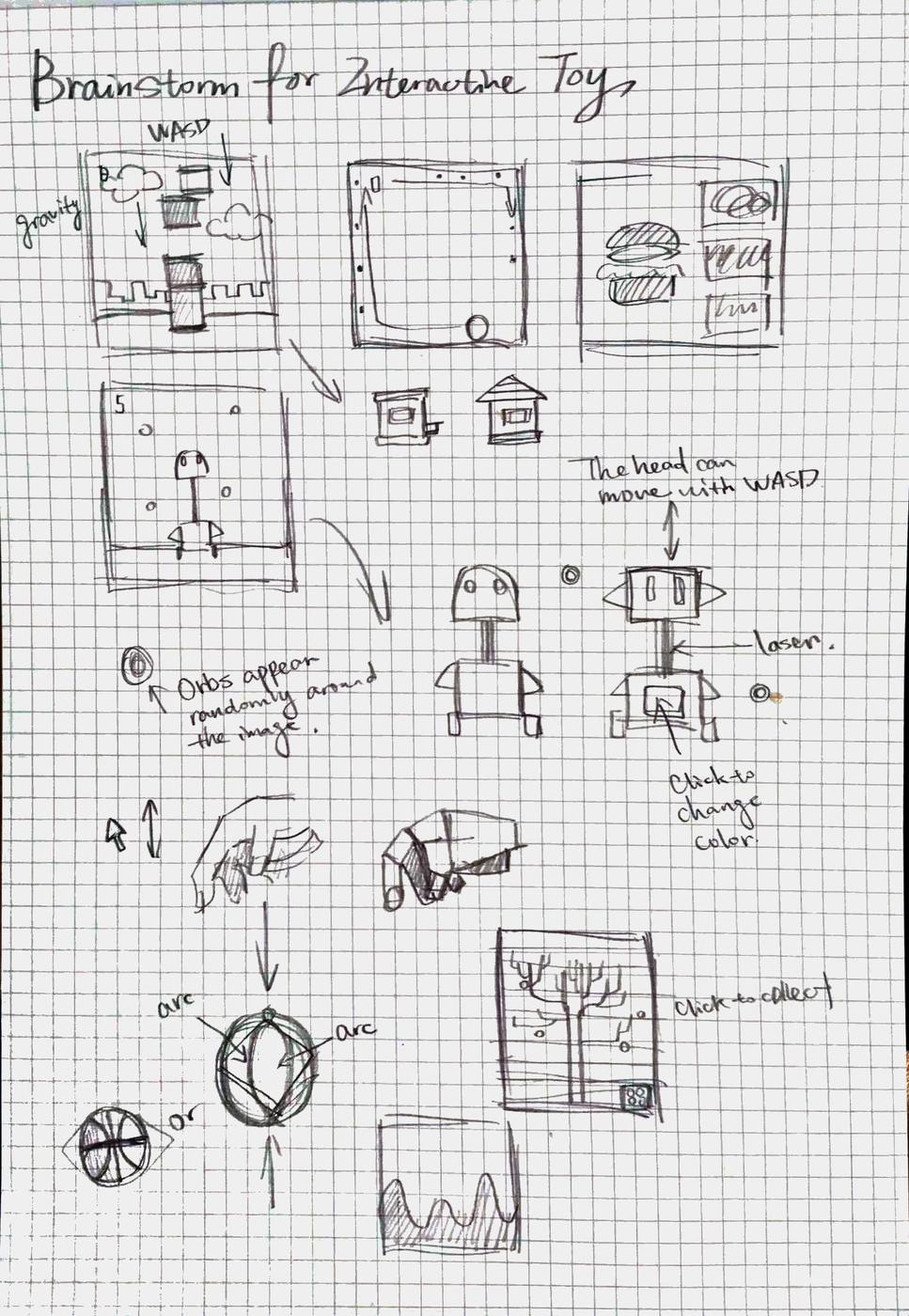
- Use WASD to control the two blocks move around
- Let laser between the two blocks to get touched with orbs to get score
- Move the mouse around to change the background color
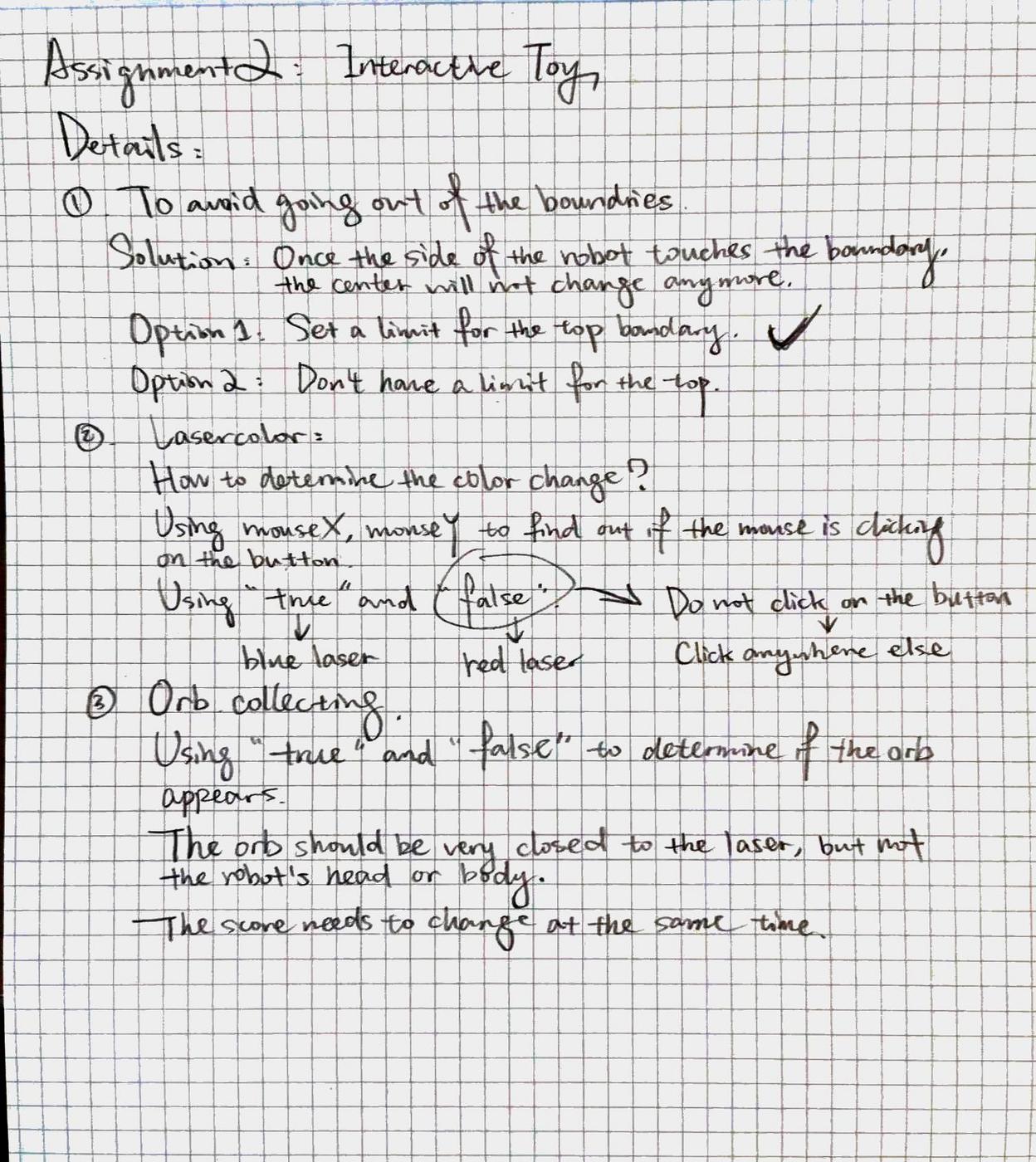
- Change the color of laser to blue by clicking the button on the robot's body, and change the color back to red by clicking any other places
*/
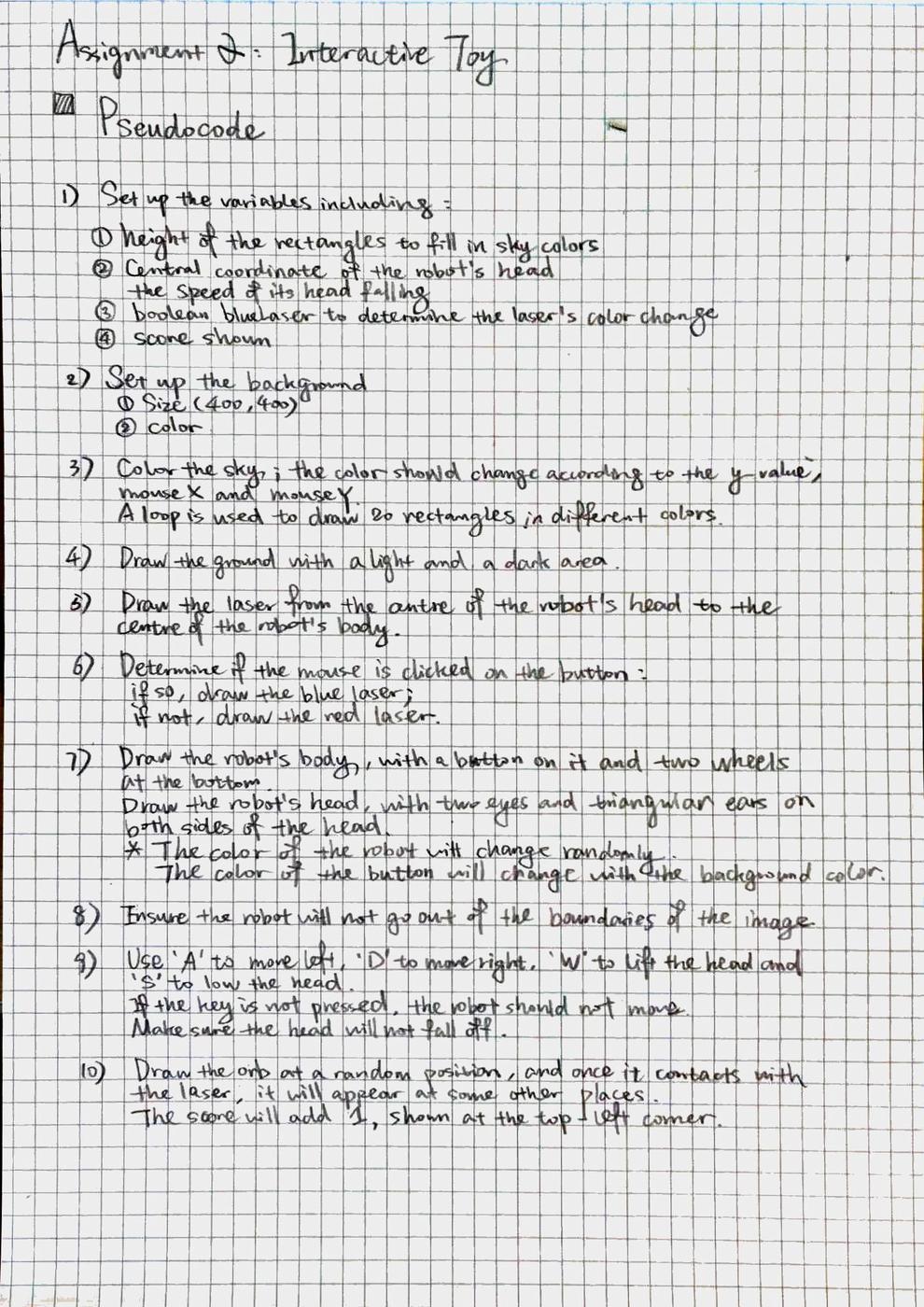
// Set the variale for sky and coloring
float skyY;
// Set variables for blocks
float blockX;
float blockY;
float blockSpeed;
// Set variables for orbs
int orbX;
int orbY;
int orbNumber;
float orbSpeed;
boolean appear;
// Set the variable to change the laser's color
boolean blueLaser;
// Set the variable for scores
int score = 0;
void setup(){
// Set up the size of the background
size(400, 400);
// Provide the following variables with initial values
blockX = 200;
blockSpeed = 1;
orbSpeed = 3;
}
// Put different parts of the toy together
void draw(){
// Color the background
background(42, 255, 255);
// Color the sky using rectangles in different colors
skyY = 0;
while(skyY < 400){
drawSky();
skyY += 20;
}
drawLand();
drawLaser();
drawBlockBase();
drawBlock();
boundaries();
updateBlock();
InteractWithOrb();
text(score, 25, 30);
}
// Draw the sky that will change color with the mouse moving
void drawSky(){
rectMode(CORNER);
noStroke();
fill(mouseY-skyY/400*255, 165+skyY/400*255, mouseX);
rect(0, skyY, 400, 20);
}
// Draw the ground
void drawLand(){
fill(#9CA5BC);
rect(0,375,400,25);
fill(#828CA5);
rect(0,380,400,20);
}
// Draw the laser that connects the two blocks together
void drawLaser(){
// Blue laser
if (blueLaser == true){
// Draw the part of laser with the darker color
stroke(#333EF2);
strokeWeight(6);
line(blockX, 355, blockX, blockY);
// Draw the part of laser with the lighter color
stroke(#A2A6FA);
strokeWeight(2);
line(blockX, 355, blockX, blockY);
}
// Red laser
if (blueLaser == false){
// Draw the part of laser with the darker color
stroke(#FF0353);
strokeWeight(6);
line(blockX, 355, blockX, blockY);
// Draw the part of laser with the lighter color
stroke(#FFA7C3);
strokeWeight(2);
line(blockX, 355, blockX, blockY);
}
}
// Determine the whether the color of the laser should change or not
void mousePressed(){
if (mouseX >= blockX-12.5 && mouseX <= blockX+12.5 && mouseY >= 345 && mouseY <= 365){
blueLaser = true;
}else{
blueLaser = false;
}
}
// Draw the robot's body
void drawBlockBase(){
rectMode(CENTER);
stroke(0);
strokeWeight(2);
fill(random(100,200), random(100,200), random(100,200));
rect(blockX, 350, 50, 40);
// Draw wheels
noStroke();
fill(0);
rect(blockX-28, 370, 4, 10);
rect(blockX+28, 370, 4, 10);
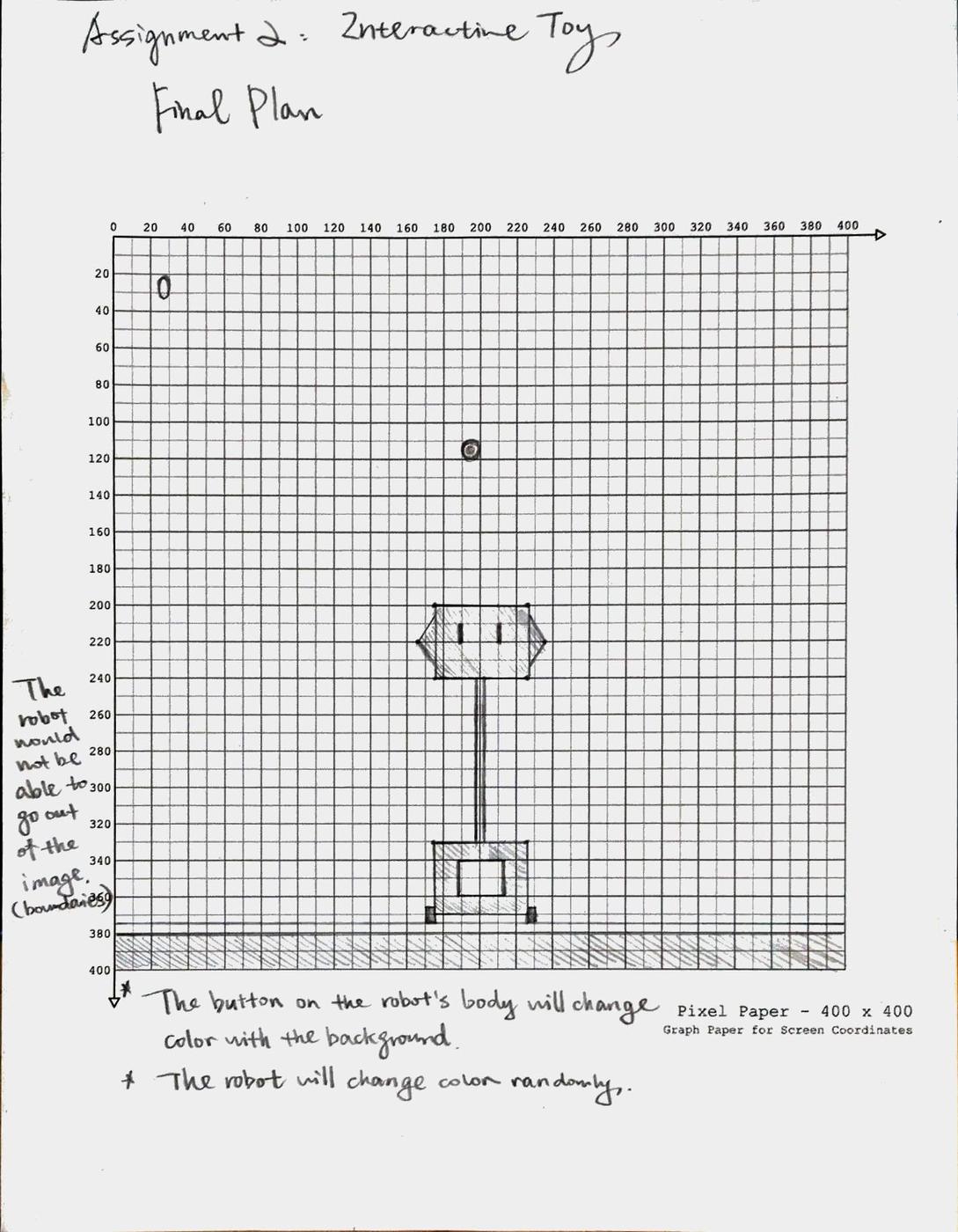
// Draw the button on the robot's body that will change color as the background does
stroke(#41DEC7);
strokeWeight(2);
fill(mouseY-skyY/400*255, 165+skyY/400*255, mouseX);
rect(blockX, 355, 25, 20);
}
// Draw the head of the robot
void drawBlock(){
stroke(0);
fill(random(100,200), random(100,200), random(100,200));
rect(blockX, blockY, 50, 40);
// Robot's ears
triangle(blockX-25, blockY-15, blockX-35, blockY, blockX-25, blockY+15);
triangle(blockX+25, blockY-15, blockX+35, blockY, blockX+25, blockY+15);
// Robot's eyes
fill(0);
rect(blockX-10, blockY-5, 2, 10);
rect(blockX+10, blockY-5, 2, 10);
}
// Determine the functions of WASD, which is to moving the robot around and its head up and down
void keyPressed(){
//
if(key == 'a'){
blockX -= 2;
}
if(key == 'd'){
blockX += 2;
}
if(key == 's'){
blockY += 2;
}
if(key == 'w'){
blockY -= 8;
}
}
// The keys stop to function of the user is not pressing them
void keyReleased(){
if(key == 'a'){
blockX -= 0;
}
if(key == 'd'){
blockX += 0;
}
if(key == 's'){
blockY += 0;
}
}
// Ensure the robot will not run out of the boundaries
void boundaries(){
if(blockX < 29){
blockX = 29;
}
if(blockX > width-29){
blockX = 371;
}
if(blockY < 20){
blockY = 20;
}
}
// Update the movement of the head of the robot(limit its movement to avoid it colliding with the body)
void updateBlock(){
blockY += blockSpeed;
if(blockY > 315){
blockY = 315;
}
}
// Let the yellow orb appears randomly if it is not touched by the laser, and the score should be counted when the laser touches the orb
// Inspired by Christopher Eewson's interactive toy from Gallery 2017.
void InteractWithOrb(){
// Decide the location of the orb
if (appear == false){
orbX = ((int)random(50, width-50));
orbY = ((int)random(50, height-100));
appear = true;
}
// Draw the orb
if (appear == true){
ellipseMode(CENTER);
stroke(#FFD746);
fill(#FFF2C4);
ellipse(orbX, orbY, 10, 10);
}
// The conditions to get the score
if (blockX >= (orbX-5) && blockY <= (orbY-20) && blockX <= (orbX+5)){
score++;
appear = false;
}
}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}