/*
________ ___ ____
/ __ __| / _ \ | _ \
______> \ | | | _ || /_____________________________
/ _______/ |_| |_| |_||_|\______________________________ \
/ / \ \
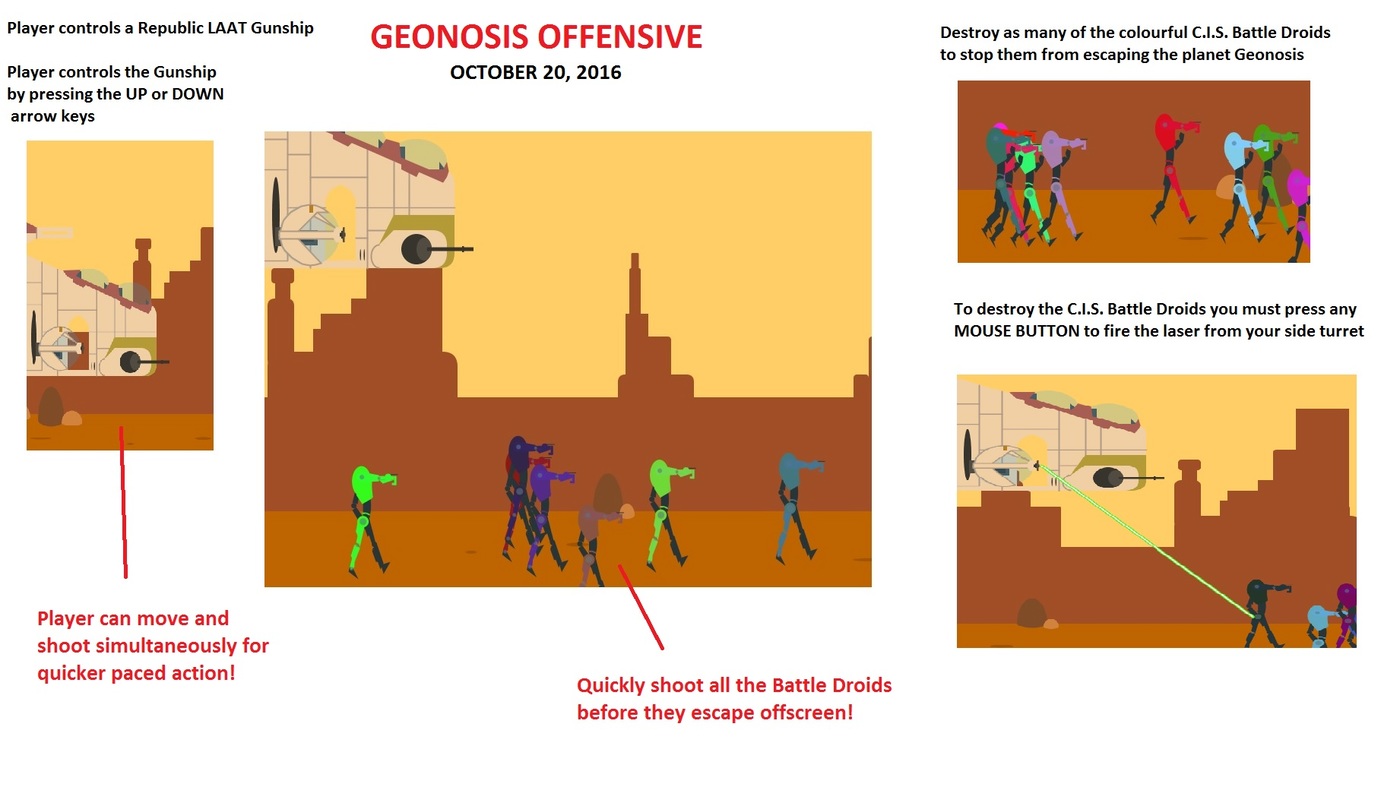
| | GEONOSIS OFFENSIVE | |
| | The C.I.S. is retreating from the planet Geonosis. | |
| | Press down any mouse button to shoot your lasers. | |
| | Destroy as much of the droid army as you can! | |
| | Do not let them escape! | |
| | | |
| | Aidan Paredes-Morris | |
| | October, 21,2016 | |
| | | |
\ \____________________________ _ ___ ____ _______/ /
\___________________________ | | | / _ \ | _ \ / _______/
| |/\| || _ || / > \ LS
\_/\_/ |_| |_||_|\_\|__/
*/
//declaring global variables
Background bg;
Droid [] droids=new Droid [10];//creates an array of droids
RepublicShip republicShip;
int shipY;
void setup()
{
size (800, 600);
background(255);
noStroke();
for (int d=0; d<droids.length; d++)
{
droids[d]= new Droid (random(1000, 1200), random(400, 500), random(4, 10), 0);
}
//initializing global variables
bg =new Background ();
republicShip=new RepublicShip();
shipY=0;
}
void draw()
{
bg.update();
for (int d=0; d<droids.length; d++)
{
droids[d].update();
droids[d].laserCollision();
}
republicShip.update();
//draw background
bg.display();
//draws droids
for (int d=0; d<droids.length; d++)
{
droids[d].display();
}
//draw republic ship
republicShip.display();
}class Background
{
//declaring variables
int bX1;
int bX2;
int bX3;
int bVelocity;
int fX1;
int fX2;
float fY;
int fVelocity;
Background()
{
//initializing variables
bX1=0;
bX2=200;
bX3=500;
bVelocity=1;
fX1=0;
fX2=400;
fY=random(500, 590);
fVelocity=8;
}
void display()
{
//draw sky
background(255, 206, 103);
//draw ground
fill(161, 79, 39);
rect(0, 350, 800, 250);
//draw spire #1
rect(bX1+20, 320, 100, 40, 10);
rect (bX1+30, 240, 30, 80);
rect(bX1+55, 270, 35, 60, 5);
rect(bX1+35, 180, 15, 70, 3);
rect(bX1+37.5, 160, 10, 30, 2);
//draw spire #2
rect(bX2+50, 270, 160, 90, 5);
rect(bX2+30, 320, 20, 40, 5);
rect(bX2+140, 220, 20, 60, 10);
rect(bX2+140, 240, 30, 40, 5);
rect(bX2+105, 200, 50, 80, 5);
rect(bX2+120, 140, 20, 70, 10);
rect(bX2+125, 110, 10, 40);
rect(bX2+125, 80, 5, 40);
//draw spire#3
rect(bX3+60, 290, 250, 80, 20);
rect(bX3+60, 220, 35, 90, 10);
rect(bX3+70, 200, 20, 30);
rect(bX3+65, 180, 30, 20, 5);
rect(bX3+120, 260, 60, 40);
rect(bX3+130, 240, 50, 30);
rect(bX3+170, 220, 30, 80);
rect(bX3+190, 160, 50, 140, 5);
rect(bX3+220, 80, 70, 220);
//draw foreground
fill(190, 100, 0);
rect(0, 500, 800, 150);
//draw rocks
fill(160, 84, 0);
ellipse(fX1+100, fY, 30, 5);
ellipse(fX1-40, fY+10, 15, 4);
ellipse(fX2+10, fY+20, 40, 4);
ellipse(fX2+100, fY, 40, 3);
fill(129, 77, 41);
arc(fX1+140, 500, 40, 100, PI, TWO_PI);
ellipse(fX1+140, 500, 40, 15);
arc(fX2+120, 510, 50, 120, PI, TWO_PI);
ellipse(fX2+120, 510, 50, 25);
fill(210, 131, 62);
arc(fX1+165, 505, 20, 30, PI, TWO_PI);
ellipse(fX1+165, 505, 20, 10);
arc(fX2+60, 505, 40, 50, PI, TWO_PI);
ellipse(fX2+60, 505, 40, 15);
arc(fX2+160, 516, 40, 45, PI, TWO_PI);
ellipse(fX2+160, 516, 40, 10);
}
void update()
{
//moves background and foreground segments from right to left
bX1-=bVelocity;
bX2-=bVelocity;
bX3-=bVelocity;
fX1-=fVelocity;
fX2-=fVelocity;
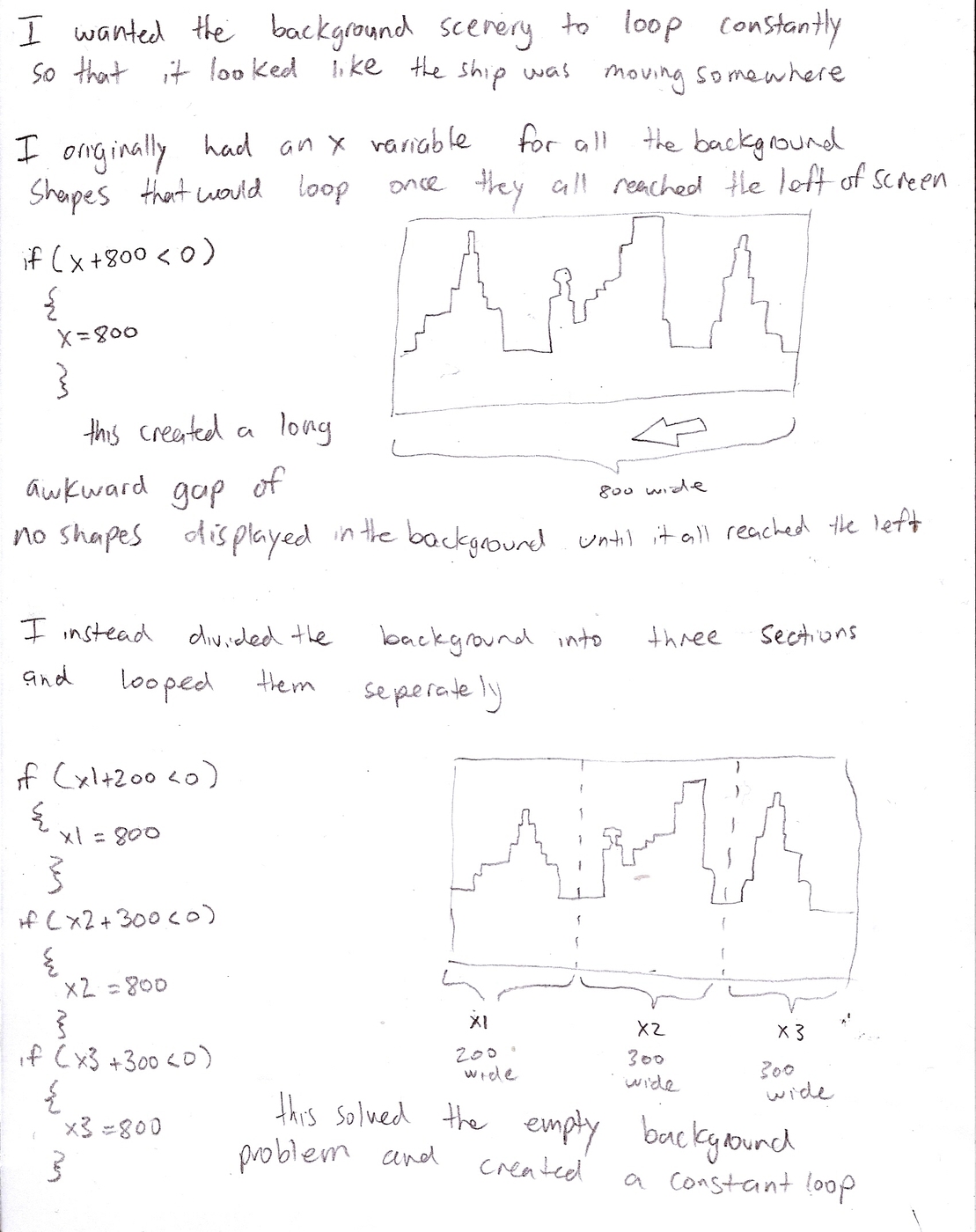
//if background and foreground segments reach the leftside, reset them to the right
if (bX1+200 <0)
{
bX1=800;
}
if (bX2+300<0)
{
bX2=800;
}
if (bX3+300<0)
{
bX3=800;
}
if (fX1+150<0)
{
fX1=800;
}
if (fX2+400<0)
{
fX2=800;
}
}
}class Droid
{
//declaring variables
PVector position=new PVector();
PVector velocity=new PVector();
color droidColour;
int run;
Droid(float x, float y, float velocityX, float velocityY)
{
//initializing variables
position.x=x;
position.y=y;
velocity.x=velocityX;
velocity.y=velocityY;
run=0;
droidColour=color(random(255), random(255), random(255)); //sets colours to random
}
//checks for laser collision
void laserCollision()
{
if (mousePressed==true)
{
if (mouseX-20>=position.x && mouseX-20 <=position.x+50 && mouseY >=position.y &&mouseY<=position.y+160) //if laser hits droids, reset droid position
{
position.x=random(1000, 1200);
position.y=random(400, 500);
droidColour=color(random(255), random(255), random(255));
}
}
}
void display()
{
//draw droids
//dark gray
fill(40, 53, 57);
//middle stomach area
rect(position.x+24, position.y+35, 9, 25);
arc(position.x+31, position.y+44, 7, 30, PI+HALF_PI, TWO_PI+HALF_PI);
//armblaster
rect(position.x+60, position.y+2.7, 10, 1);
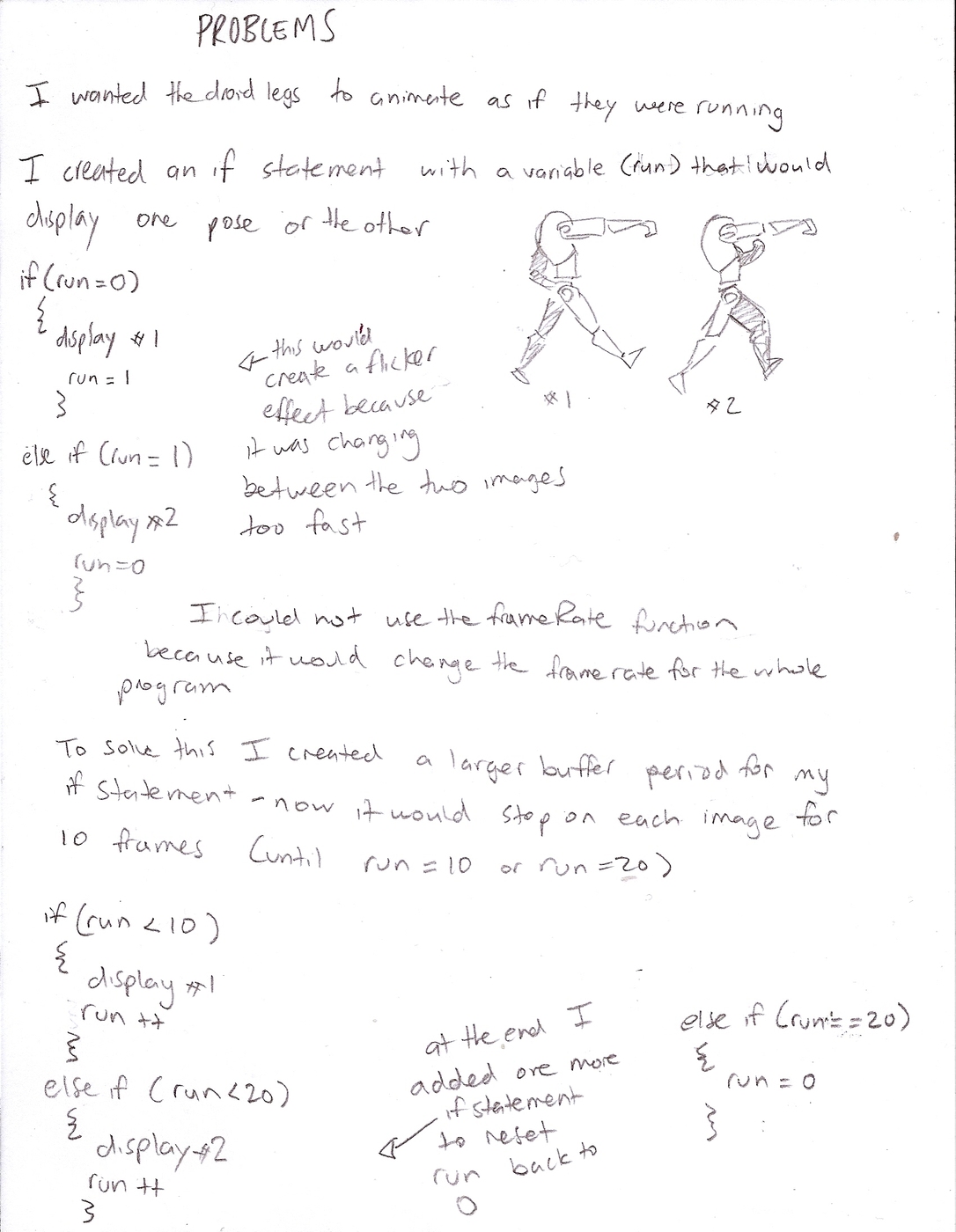
//these IF statements draw the left arm animation
if (run<10)
{
quad(position.x+15, position.y+20, position.x+10, position.y+40, position.x+17, position.y+42, position.x+20, position.y+20);
ellipse(position.x+12, position.y+44, 7, 7);
quad(position.x+15, position.y+46, position.x+10, position.y+50, position.x+24.5, position.y+75, position.x+25, position.y+60);
} else if (run<20)
{
quad(position.x+40, position.y+26, position.x+30, position.y+30, position.x+37, position.y+40, position.x+46, position.y+29);
beginShape();
vertex(position.x+43, position.y+16);
vertex(position.x+41, position.y+21);
vertex(position.x+42, position.y+26);
vertex(position.x+45.5, position.y+30);
vertex(position.x+47, position.y+26);
vertex(position.x+48, position.y+19);
endShape(CLOSE);
}
//darker gray
fill(droidColour-20);
//body
ellipse(position.x+22, position.y+12, 25, 40);
quad(position.x+15, position.y+30, position.x+23, position.y+42, position.x+35, position.y+35, position.x+36, position.y+10);
triangle(position.x+35, position.y+15, position.x+35, position.y+35, position.x+37, position.y+33);
//waist
rect(position.x+23, position.y+53, 5, 2);
quad(position.x+28, position.y+53, position.x+33, position.y+55, position.x+33, position.y+57, position.x+28, position.y+55);
ellipse(position.x+27.5, position.y+65, 5, 10);
//light gray
fill(droidColour);
//armjoint
ellipse(position.x+22.5, position.y+6.5, 13, 13);
//upperarm
quad(position.x+25, position.y, position.x+45, position.y+4, position.x+45, position.y+12, position.x+25, position.y+13);
rect(position.x+45, position.y+5, 20, 5);//forearm
rect(position.x+53, position.y+2, 8, 10, 20);
triangle(position.x+45, position.y+10, position.x+50, position.y+15, position.x+65, position.y+10);
rect(position.x+65, position.y+5, 3, 12);
rect(position.x+62, position.y+14, 5, 3);
//lightest gray for joints
fill(92, 119, 129, 150);
ellipse(position.x+22.5, position.y+6.5, 6, 6);
ellipse(position.x+45, position.y+8, 4, 4);
//these IF statements create the running legs animation
if (run<10)
{
//dark gray
fill(40, 53, 57);
//pelvisjoint
ellipse(position.x+27.5, position.y+65, 10, 20);
//foot
triangle(position.x+7.5, position.y+120, position.x+5, position.y+131, position.x+18, position.y+141);
//(background leg)
quad(position.x+27.5, position.y+70, position.x+37, position.y+98, position.x+41, position.y+95, position.x+32, position.y+60);
quad(position.x+25, position.y+70, position.x+30, position.y+85, position.x+35, position.y+80, position.x+30, position.y+70);
ellipse(position.x+39, position.y+95, 7, 7);
quad(position.x+37, position.y+100, position.x+47, position.y+128, position.x+51, position.y+120, position.x+42.5, position.y+95);
quad(position.x+37, position.y+100, position.x+36, position.y+104, position.x+41, position.y+118, position.x+45, position.y+118);
triangle(position.x+47.5, position.y+122, position.x+51, position.y+134, position.x+60, position.y+118);
//legs
//light gray
fill(droidColour);
quad(position.x+22.5, position.y+60, position.x+15, position.y+92, position.x+20, position.y+98, position.x+27.5, position.y+65);
quad(position.x+17, position.y+65, position.x+14.5, position.y+78, position.x+17.5, position.y+85, position.x+25, position.y+65);
beginShape();
vertex(position.x+15, position.y+95);
vertex(position.x+6.5, position.y+124);
vertex(position.x+8, position.y+129);
vertex(position.x+12.5, position.y+125);
vertex(position.x+13, position.y+118);
vertex(position.x+20, position.y+100);
endShape(CLOSE);
quad(position.x+15, position.y+95, position.x+12.5, position.y+96, position.x+8, position.y+110, position.x+10, position.y+114);
//darker gray
fill(droidColour-20);
ellipse(position.x+24, position.y+65, 15, 15);
//lightest gray for joints
fill(92, 119, 129, 150);
ellipse(position.x+24, position.y+65, 9, 9);
ellipse(position.x+17, position.y+96, 5, 5);
ellipse(position.x+9, position.y+127, 5, 5);
run++;
} else if (run<20)
{
//dark gray
fill(40, 53, 57);
//pelvisjoint
ellipse(position.x+27.5, position.y+65, 10, 20);
triangle(position.x+52, position.y+130, position.x+55, position.y+138, position.x+65, position.y+125);
//(background leg)
quad(position.x+25, position.y+70, position.x+20, position.y+105, position.x+22.5, position.y+110, position.x+35, position.y+70);
quad(position.x+23, position.y+69, position.x+20, position.y+85, position.x+25, position.y+90, position.x+30, position.y+70);
ellipse(position.x+20, position.y+109, 5, 5);
beginShape();
vertex(position.x+20, position.y+105);
vertex(position.x+6, position.y+125);
vertex(position.x+6.5, position.y+130);
vertex(position.x+11, position.y+130);
vertex(position.x+11.5, position.y+126);
vertex(position.x+22.5, position.y+115);
endShape(CLOSE);
quad(position.x+21, position.y+109, position.x+16.5, position.y+106, position.x+10, position.y+113, position.x+12.5, position.y+120);
triangle(position.x+7.5, position.y+125, position.x+3, position.y+125, position.x+12, position.y+140);
//legs
//light gray
fill(droidColour);
quad(position.x+35, position.y+65, position.x+45, position.y+100, position.x+41, position.y+103, position.x+27.5, position.y+70);
quad(position.x+27.5, position.y+75, position.x+32.5, position.y+90, position.x+35, position.y+90, position.x+31, position.y+70);
beginShape();
vertex(position.x+42, position.y+105);
vertex(position.x+51, position.y+131);
vertex(position.x+55, position.y+132);
vertex(position.x+55, position.y+125);
vertex(position.x+46, position.y+100);
endShape(CLOSE);
quad(position.x+45, position.y+105, position.x+41, position.y+110, position.x+45, position.y+120, position.x+50, position.y+120);
//darker gray
fill(droidColour-20);
ellipse(position.x+29, position.y+67, 15, 15);
//lightest gray for joints
fill(92, 119, 129, 150);
ellipse(position.x+29, position.y+67, 9, 9);
ellipse(position.x+43, position.y+102, 5, 5);
ellipse(position.x+53, position.y+130, 5, 5);
run++;
} else if (run==20)
{
run=0;
}
}
void update()
{
position.sub(velocity);
//if droids reach left side of screen, reset them to the right
if (position.x<0-50)
{
position.x=random(1000, 1200);
position.y=random(400, 500);
droidColour=color(random(255), random(255), random(255));
}
}
}class RepublicShip
{
//declaring variables
int shipVelocity;
float angle;
int anchorX;
int anchorY;
RepublicShip ()
{
//initializing variables
shipVelocity=5;
angle=0;
anchorX=55;
anchorY=140+shipY;
}
void display()
{
//draw republic ship
//cockpit
fill(83, 76, 66);
rect(170, shipY+20, 15, 30);
rect(90, shipY-10, 16, 30);
triangle(230, shipY+40, 230, shipY+60, 245, shipY+60);
triangle(150, shipY+10, 150, shipY+30, 170, shipY+30);
fill(37, 170, 241, 50);
ellipse(200, shipY+40, 80, 60);
ellipse(120, shipY+15, 80, 60);
//hull
fill(240, 207, 164);
triangle(0, shipY+60, 240, shipY+60, 0, shipY-40);
rect(0, shipY+0, 80, 180);
rect(120, shipY+50, 130, 130, 20);
rect(80, shipY+50, 60, 20);
rect(80, shipY+170, 60, 10);
//left door corner
beginShape();
vertex(80, shipY+70);
vertex(80, shipY+90);
vertex(82.5, shipY+85);
vertex(85, shipY+80);
vertex(87.5, shipY+77.5);
vertex(90, shipY+75);
vertex(95, shipY+72.5);
vertex(100, shipY+70);
endShape();
//right door corner
beginShape();
vertex(120, shipY+70);
vertex(100, shipY+70);
vertex(105, shipY+72.5);
vertex(110, shipY+75);
vertex(112.5, shipY+77.5);
vertex(115, shipY+80);
vertex(117.5, shipY+85);
vertex(120, shipY+90);
endShape();
//missile tubes
rect(0, shipY-90, 30, 20);
rect(30, shipY-90, 60, 7.5);
rect(30, shipY-77.5, 60, 7.5);
rect(80, shipY-90, 10, 20);
triangle(0, shipY-70, 0, shipY-60, 20, shipY-70);
//red highlight
fill(168, 94, 83);
triangle(0, shipY-100, 0, shipY-90, 20, shipY-90);
rect(0, shipY-90, 20, 10);
fill(240, 207, 164);
//line details
stroke(175, 154, 133);
//(verticals)
line(20, shipY-90, 20, shipY-70);
line(30, shipY-27, 30, shipY+169);
line(60, shipY-14, 60, shipY+179);
line(135, shipY+20, 135, shipY+180);
line(170, shipY+40, 170, shipY+110);
line(190, shipY+50, 190, shipY+110);
arc(150, shipY+164, 20, 30, HALF_PI, PI+HALF_PI);
//(horizontals)
line(0, shipY+10, 30, shipY+10);
line(30, shipY+30, 60, shipY+30);
line(60, shipY+60, 135, shipY+60);
line(120, shipY+140, 135, shipY+140);
line(135, shipY+130, 160, shipY+130);
strokeWeight(1.5);
line(0, shipY+50, 30, shipY+50);
line(0, shipY+170, 30, shipY+170);
line(30, shipY+100, 80, shipY+100);
line(120, shipY+100, 250, shipY+100);
strokeWeight(1);
noStroke();
//red
fill(168, 94, 83);
quad(80, shipY+0, 235, shipY+67.5, 240, shipY+60, 70, shipY-12);
quad(90, shipY+0, 90, shipY+10, 110, shipY+20, 115, shipY+15);
quad(180, shipY+40, 180, shipY+50, 200, shipY+60, 205, shipY+50);
quad(240, shipY+40, 230, shipY+60, 240, shipY+60, 242.5, shipY+52.5);
triangle(70, shipY-12, 105, shipY-13, 95, shipY+0);
triangle(215, shipY+50, 230, shipY+60, 240, shipY+50);
quad(160, shipY+10, 150, shipY+25, 180, shipY+40, 177.5, shipY+15);
//green
fill(181, 155, 55);
triangle(170, shipY+110, 150, shipY+150, 170, shipY+130);
rect(170, shipY+110, 60, 20);
rect(230, shipY+110, 20, 50);
rect(185, shipY+120, 65, 60, 20);
fill(240, 207, 164);
rect(170, shipY+130, 70, 50, 20);
//front gun mount
fill(56, 52, 46);
ellipse(200, shipY+155, 40, 40);
fill(83, 76, 66);
ellipse(210, shipY+155, 20, 30);
//pod mount
rect(40, shipY+130, 30, 20);
fill(56, 52, 46);
rect(45, shipY+135, 20, 10);
//black stripes
ellipse(15, shipY+110, 10, 100);
ellipse(126.25, shipY+162.5, 1.5, 15);
ellipse(131.25, shipY+162.5, 1.5, 15);
//front gun barrel
rect(215, shipY+152.5, 60, 5);
ellipse(215, shipY+155, 3, 5);
rect(260, shipY+151, 2.5, 8);
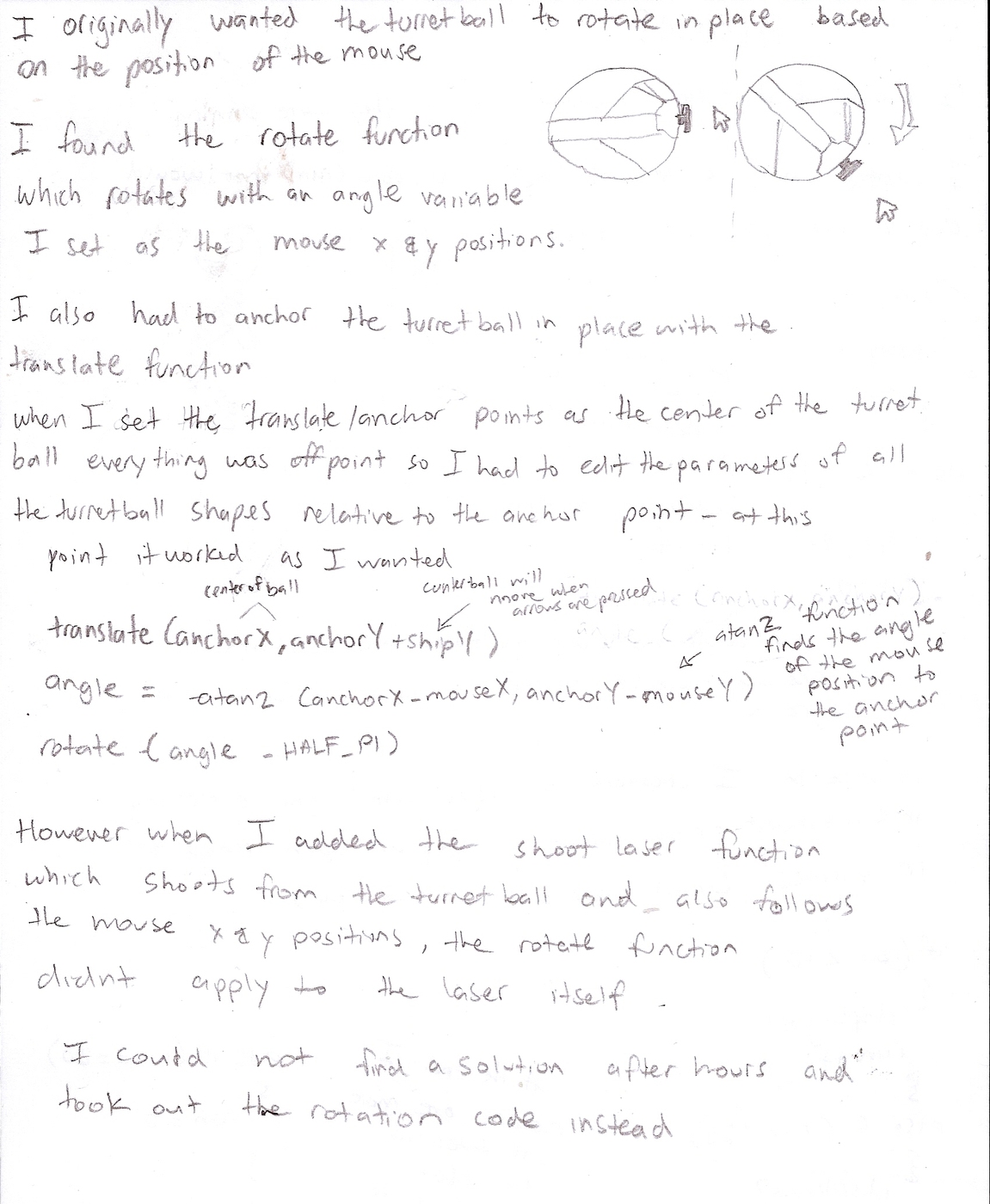
//draw side turret
/*
*UNUSABLE CODE FOR SIDE TURRET ROTATION*
mouseX=constrain(mouseX, 230, 800);
mouseY=constrain(mouseY, 0, 580);
translate(anchorX, anchorY+shipY);
angle = -atan2(anchorX-mouseX, anchorY-mouseY);
rotate(angle-HALF_PI);
*/
fill(83, 76, 66);
rect(10+(mouseX/50), shipY+130+(mouseY/-50), 10, 25);
fill(37, 170, 241, 50);
ellipse(55+(mouseX/50), shipY+140+(mouseY/-50), 80, 80);
fill(240, 207, 164);
stroke(175, 154, 133);
strokeWeight(2);
triangle(65+(mouseX/50), shipY+110+(mouseY/-50), 88+(mouseX/50), shipY +130+(mouseY/-50), 60+(mouseX/50), shipY+115+(mouseY/-50));
beginShape();
vertex(35+(mouseX/50), shipY+140+(mouseY/-50));
vertex(65+(mouseX/50), shipY +110+(mouseY/-50));
vertex(75+(mouseX/50), shipY +110+(mouseY/-50));
vertex(79+(mouseX/50), shipY +110+(mouseY/-50));
vertex(74+(mouseX/50), shipY +106+(mouseY/-50));
vertex(68+(mouseX/50), shipY +103+(mouseY/-50));
vertex(63+(mouseX/50), shipY +101+(mouseY/-50));
vertex(55+(mouseX/50), shipY +100+(mouseY/-50));
vertex(44+(mouseX/50), shipY +102+(mouseY/-50));
vertex(30+(mouseX/50), shipY +110+(mouseY/-50));
vertex(21+(mouseX/50), shipY +120+(mouseY/-50));
vertex(19+(mouseX/50), shipY+125+(mouseY/-50));
vertex(15+(mouseX/50), shipY +140+(mouseY/-50));
endShape();
beginShape();
vertex(35+(mouseX/50), shipY+140+(mouseY/-50));
vertex(70+(mouseX/50), shipY +177+(mouseY/-50));
vertex(63+(mouseX/50), shipY+179+(mouseY/-50));
vertex(55+(mouseX/50), shipY+180+(mouseY/-50));
vertex(45+(mouseX/50), shipY +178+(mouseY/-50));
vertex(32+(mouseX/50), shipY +170+(mouseY/-50));
vertex(22+(mouseX/50), shipY +160+(mouseY/-50));
vertex(19+(mouseX/50), shipY +155+(mouseY/-50));
vertex(15+(mouseX/50), shipY +140+(mouseY/-50));
endShape();
rect(15+(mouseX/50), shipY+135+(mouseY/-50), 80, 10);
noStroke();
quad(87+(mouseX/50), shipY+140+(mouseY/-50), 87+(mouseX/50), shipY+135+(mouseY/-50), 90+(mouseX/50), shipY+130+(mouseY/-50), 90+(mouseX/50), shipY+140+(mouseY/-50));
quad(87+(mouseX/50), shipY +140+(mouseY/-50), 87+(mouseX/50), shipY +145+(mouseY/-50), 90+(mouseX/50), shipY +150+(mouseY/-50), 90+(mouseX/50), shipY+140+(mouseY/-50));
rect(90+(mouseX/50), shipY +130+(mouseY/-50), 7, 20);
//(yellow stripe)
fill(185, 126, 34);
rect(55+(mouseX/50), shipY+101+(mouseY/-50), 5, 10);
//(turret)
fill(56, 52, 46);
rect(95+(mouseX/50), shipY+137.5+(mouseY/-50), 7.5, 5);
rect(97+(mouseX/50), shipY +135+(mouseY/-50), 2.5, 10);
fill(83, 76, 66);
rect(99.5+(mouseX/50), shipY +130+(mouseY/-50), 2, 20);
arc(100+(mouseX/50), shipY +140+(mouseY/-50), 3, 20, HALF_PI, PI+HALF_PI);
//(laser)
//if mouse is pressed, draw laser at mouse position
if (mousePressed==true)
{
stroke(78, 242, 22);
strokeWeight(5);
line(105+(mouseX/50), shipY+140+(mouseY/-50), mouseX+(mouseX/50)-10, mouseY+(mouseY/-50));
strokeWeight(2);
stroke(255);
line(105+(mouseX/50), shipY+140+(mouseY/-50), mouseX+(mouseX/50)-10, mouseY+(mouseY/-50));
noStroke();
}
}
void update()
{
//if UP arrow is pressed, move ship up, if DOWN arrow is pressed, move ship down
if (keyPressed)
{
if (keyCode==UP)
{
shipY=shipY-shipVelocity;
} else if (keyCode==DOWN)
{
shipY=shipY+shipVelocity;
}
shipY=constrain(shipY, 0, 250);
}
}
}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}